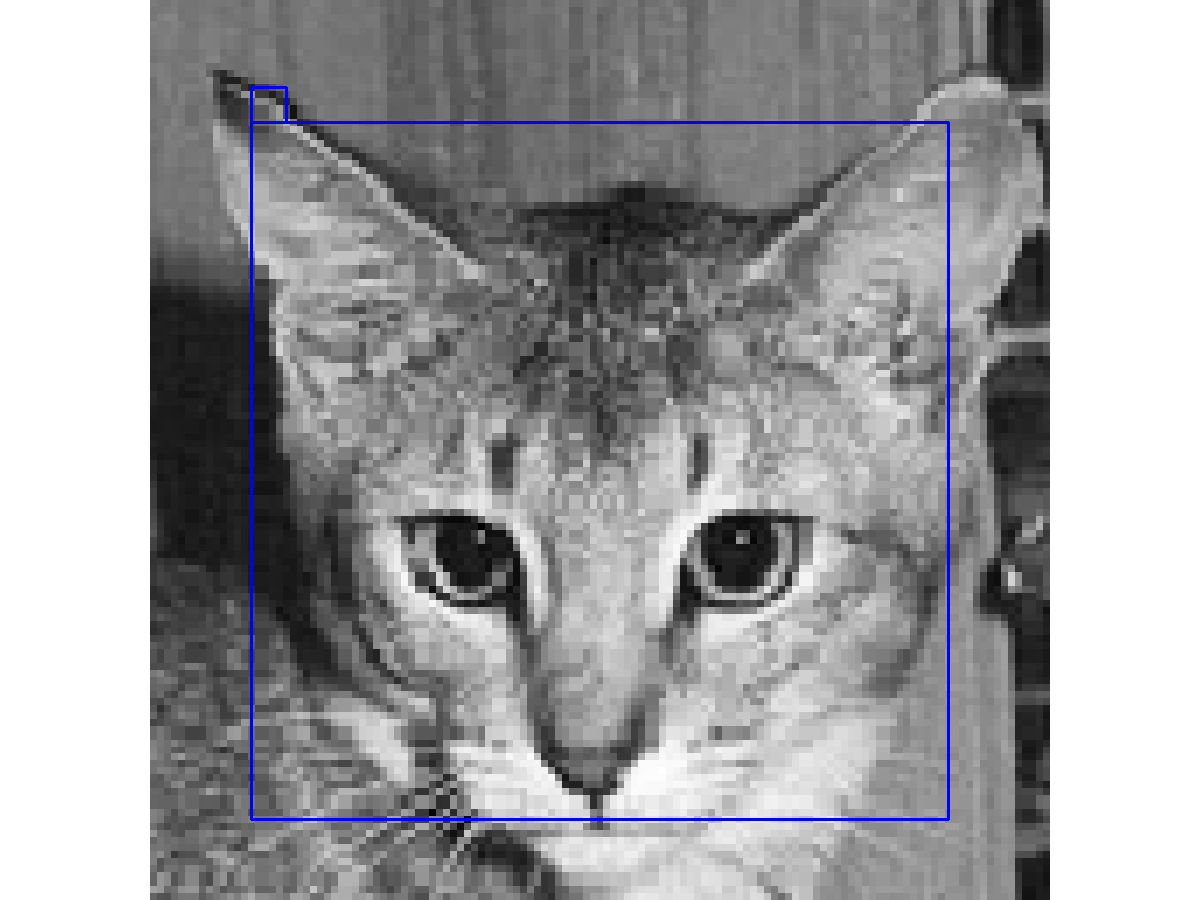
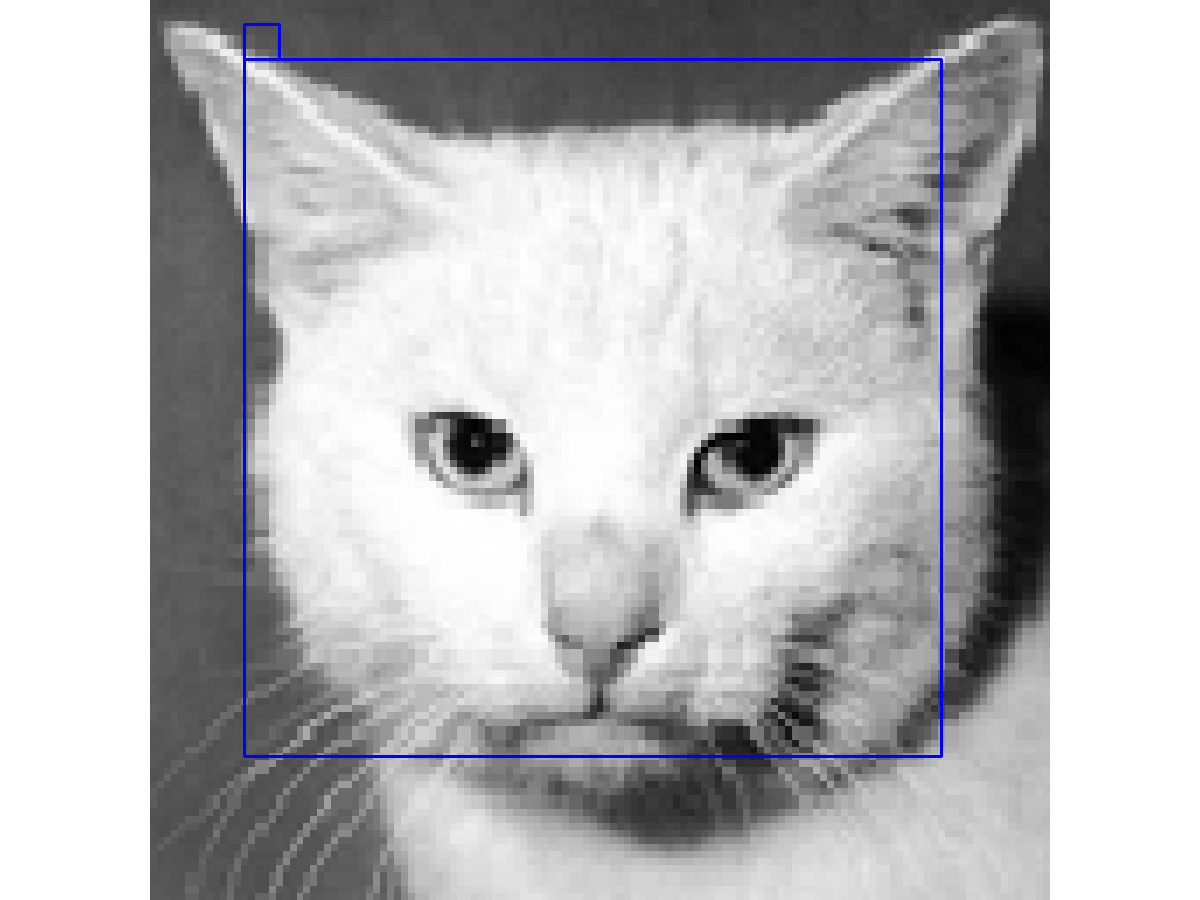
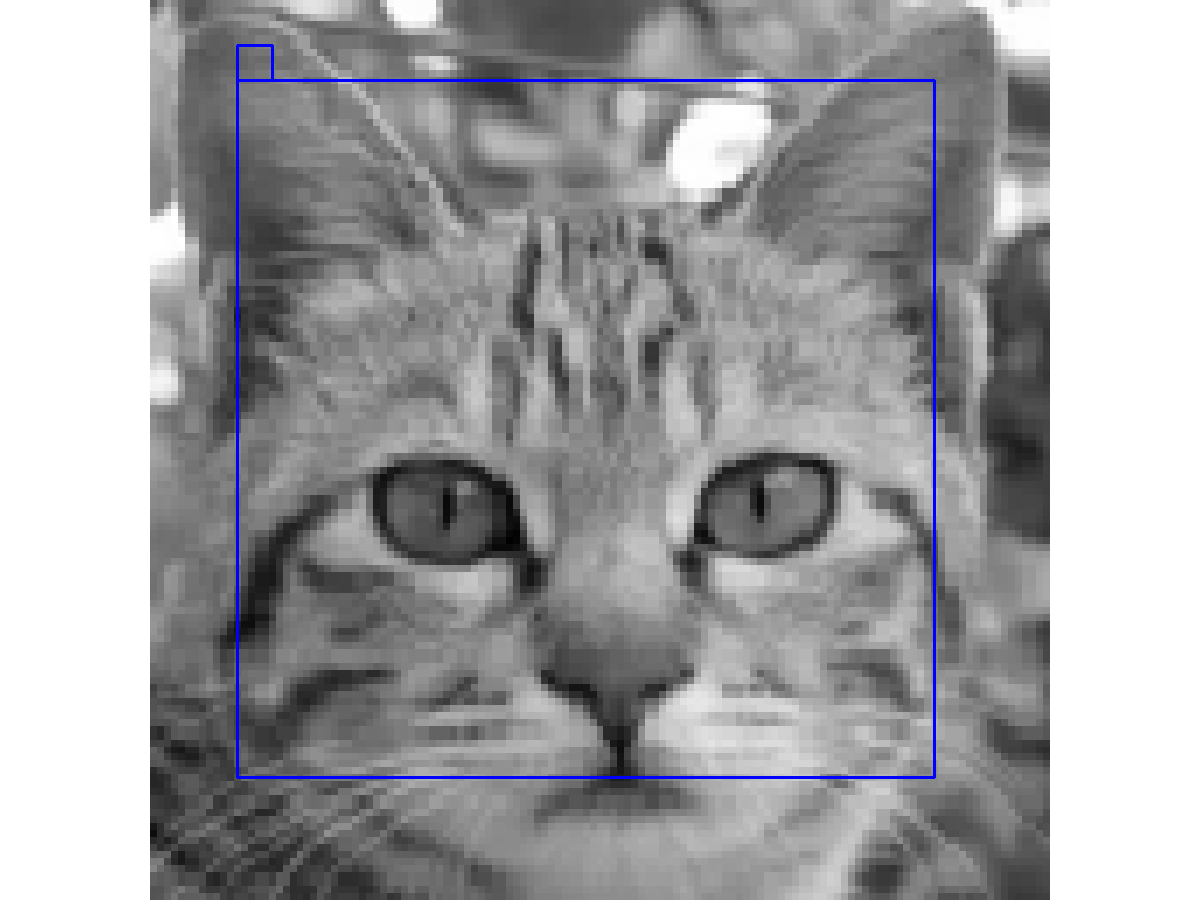
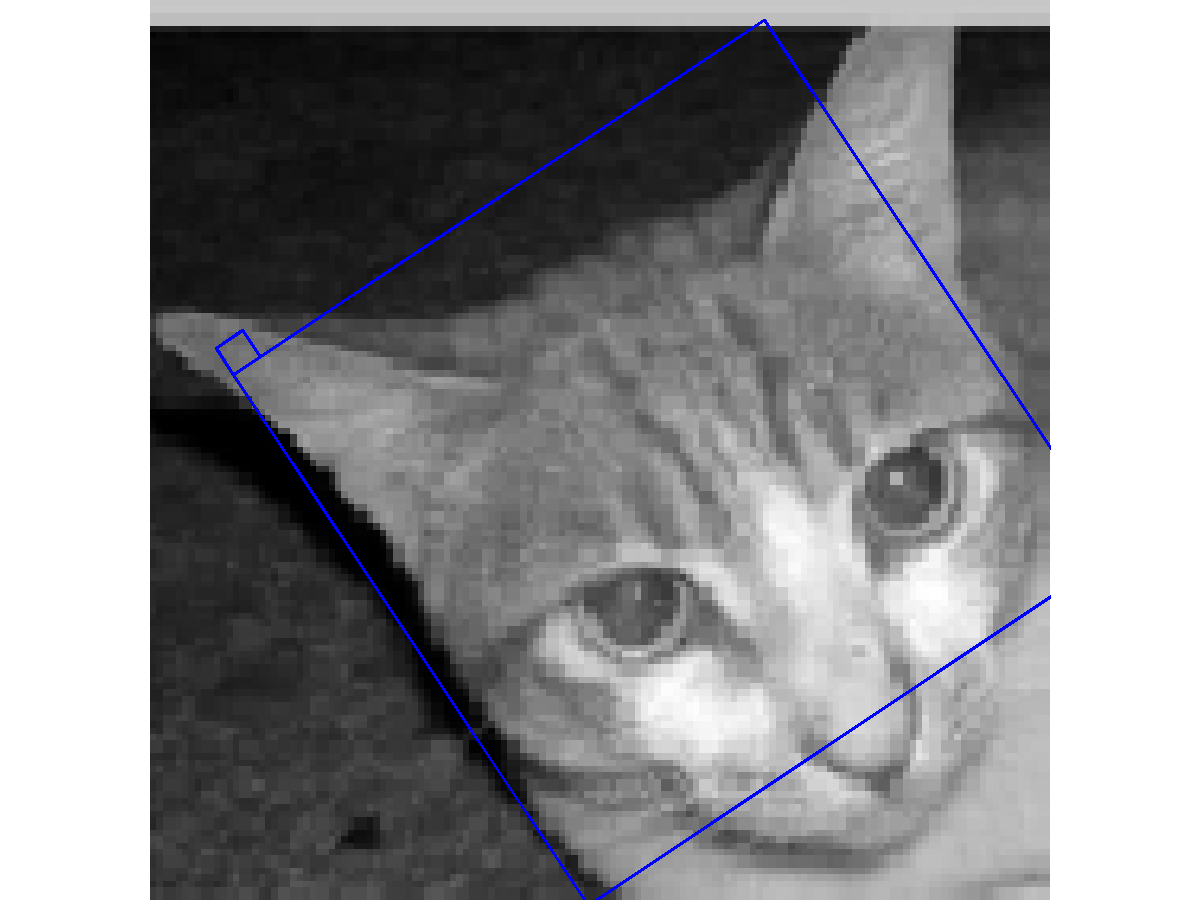
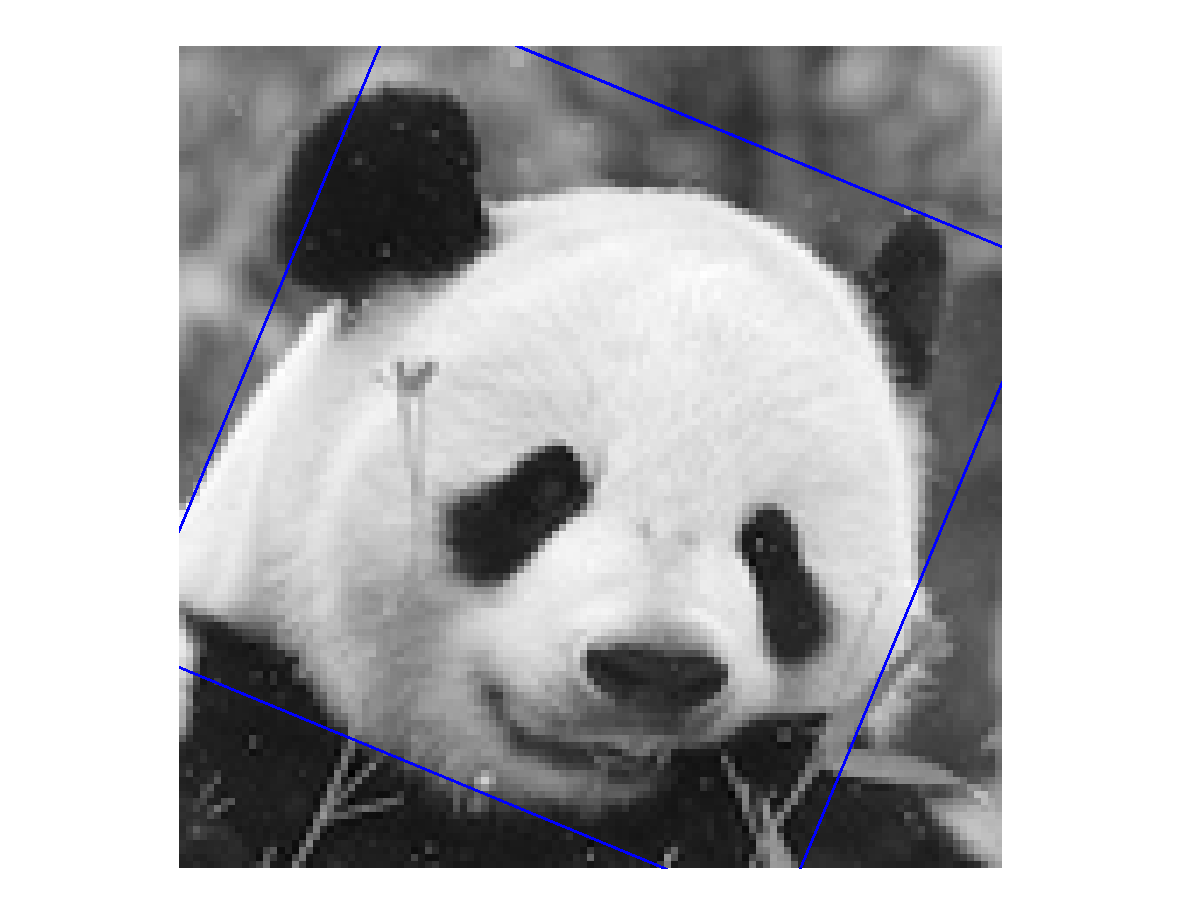
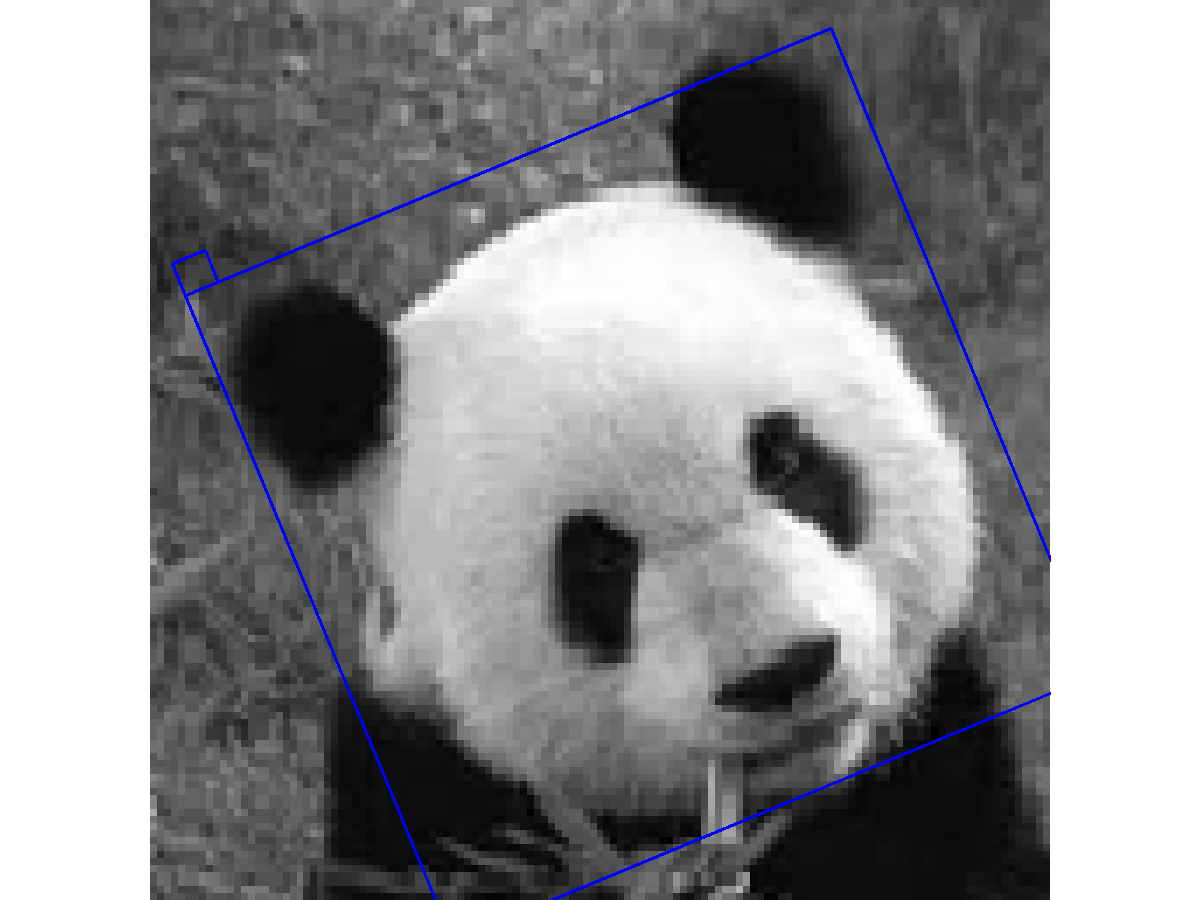
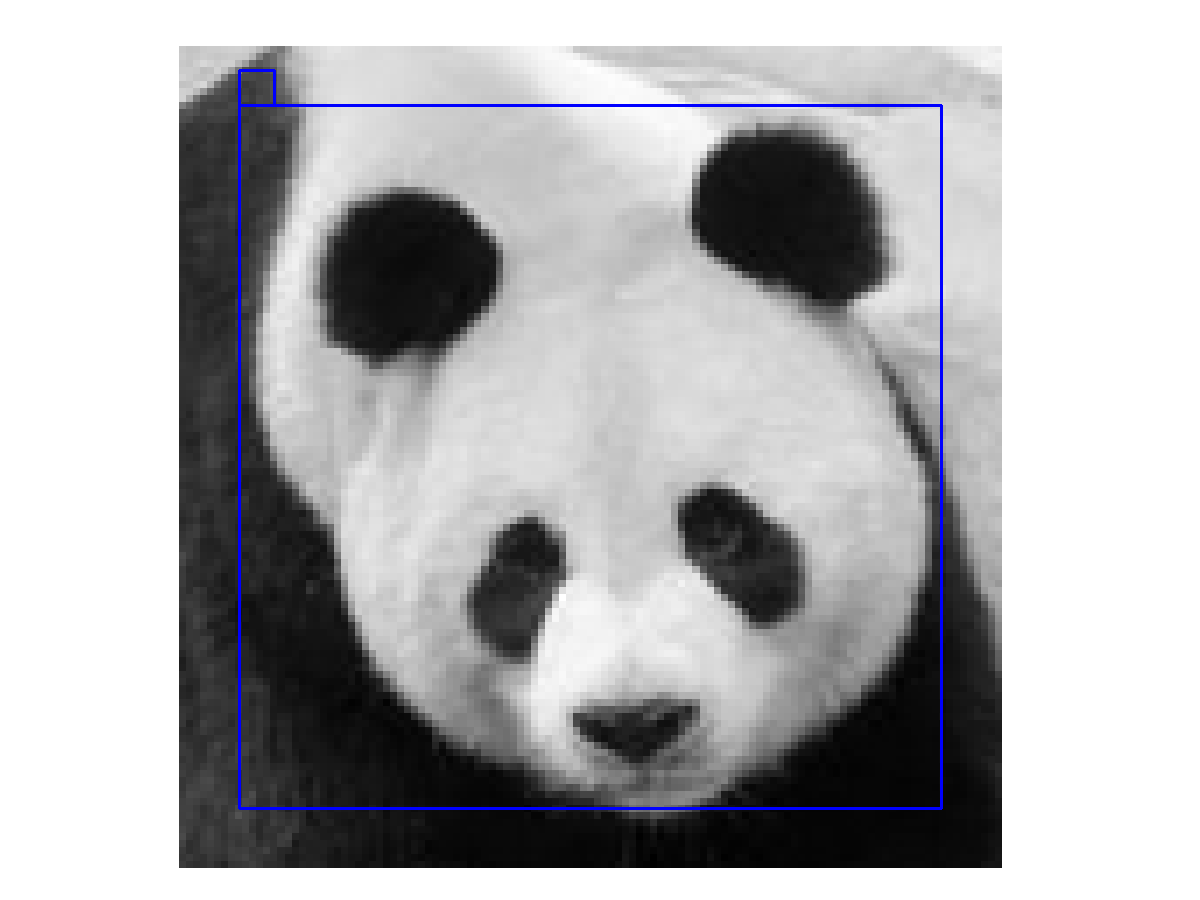
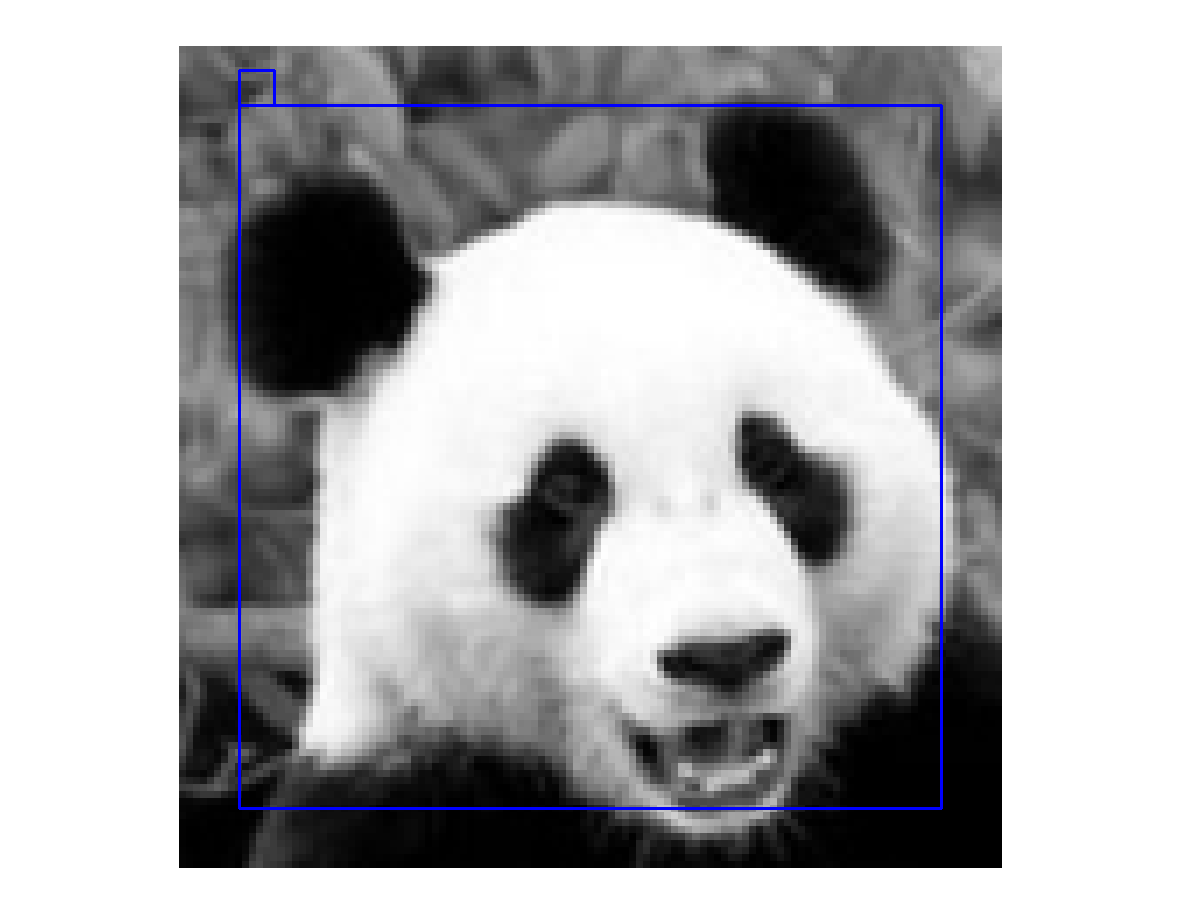
code and data for unsupervised alignment of Cats, Deers, Ducks, Pandas, and Sheep
Parameter Setting





































































































































































General Parameters: nOrient = 16; sizeTemplatex=100;
sizeTemplatey=100;
numIterationEM=2;
LocalNormOrNot = true;
Detection Parameters: rotateShiftLimit = 3; numResolution = 7;
scaleStepSize = 0.1; flipOrNot=1 only for Duck category ;
HMC Parameters: lambdaLearningRate = 0.01;
epsilon = 0.01;
L = 10; nIteraton = 5; nTileRow = 4; nTileCol = 4; numSample =3;