|
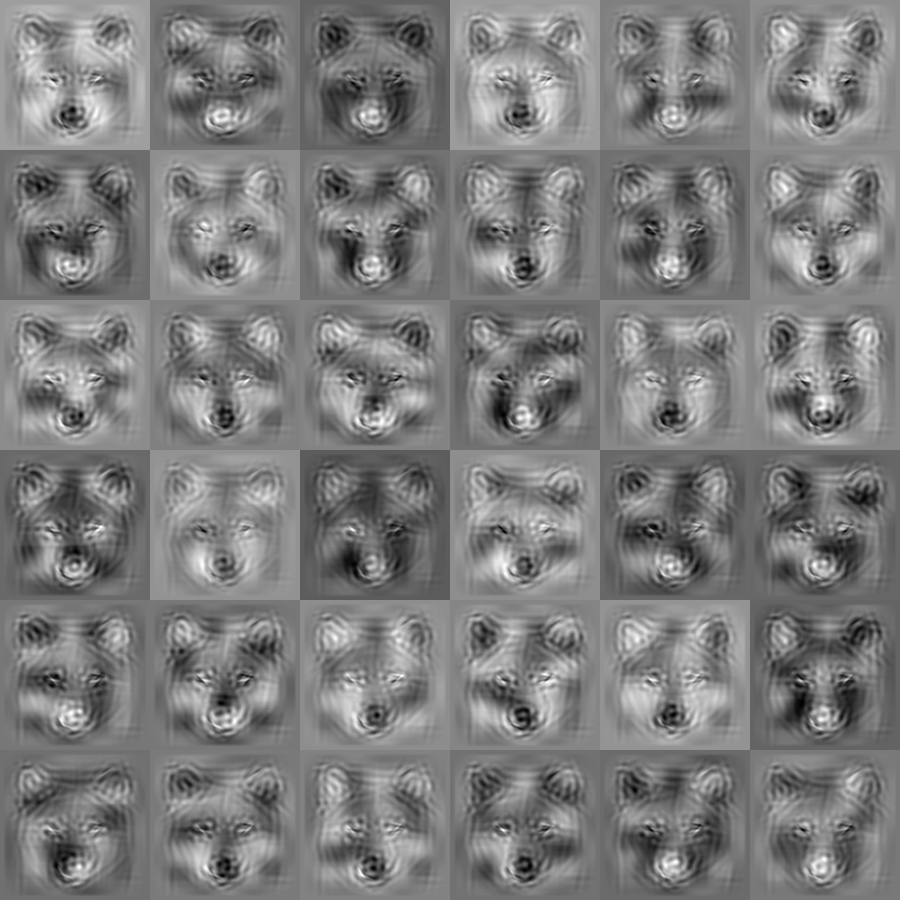
Contents Case 1 : Cat Case 2 : Deer Case 3 : Horse Case 4 : Wolf Case 5 : Duck |











































































































































































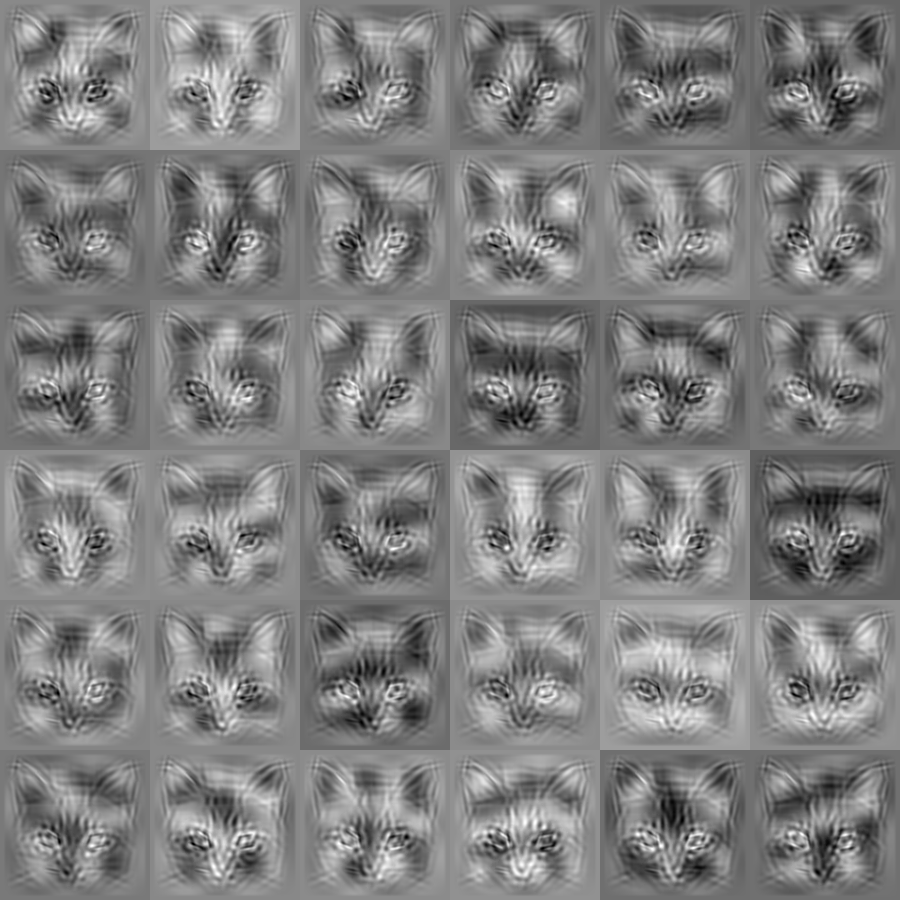
General Parameters: nOrient = 16; sizeTemplatex=150;
sizeTemplatey=150;
GaborScaleList=[0.7]; DoGScaleList=[]; GaborScaleListLastIteration=[1.4, 1, 0.7, 0.5]; DoGScaleListLastIteration=[18.90, 13.36]; sigsq = 10; locationShiftLimit = 3; orientShiftLimit = 1; numSketch= 300;
HMC Parameters: lambdaLearningRate = 0.1/sqrt(sigsq);
epsilon = 0.03;
L = 10; nIteraton =80;
Alignment Parameters: flipOrNot = false;
rotateShiftLimit=2; numberResolution=1; scaleStepSize=0.1; RatioDisplacementSUM2=0.25; numIterationEM=2;


























































































































































































General Parameters: nOrient = 16; sizeTemplatex=150;
sizeTemplatey=150;
GaborScaleList=[0.7]; DoGScaleList=[]; GaborScaleListLastIteration=[1.4, 1, 0.7, 0.5]; DoGScaleListLastIteration=[18.90, 13.36]; sigsq = 10; locationShiftLimit = 3; orientShiftLimit = 1; numSketch= 300;
HMC Parameters: lambdaLearningRate = 0.1/sqrt(sigsq);
epsilon = 0.03;
L = 10; nIteraton =80;
Alignment Parameters: flipOrNot = false;
rotateShiftLimit=2; numberResolution=1; scaleStepSize=0.1; RatioDisplacementSUM2=0.25; numIterationEM=2;
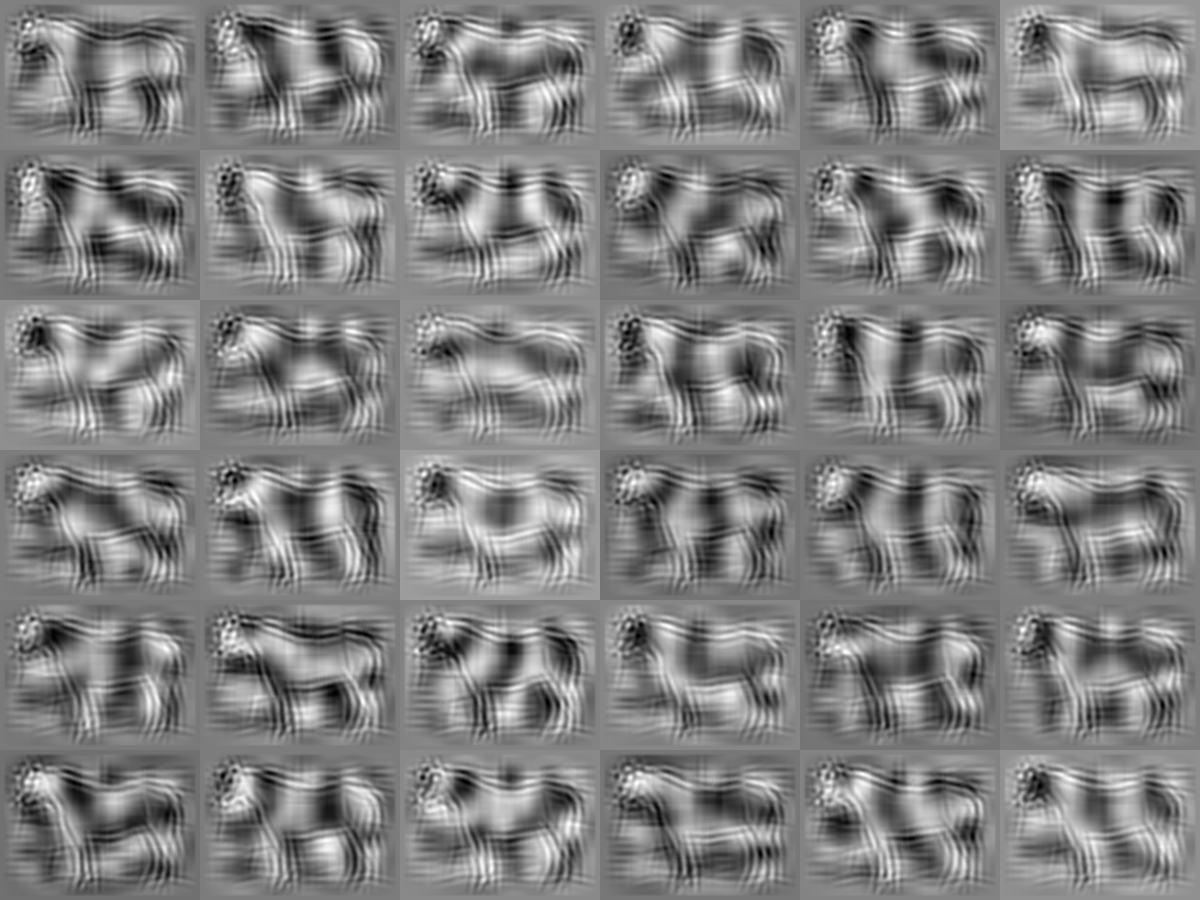




































































































































































































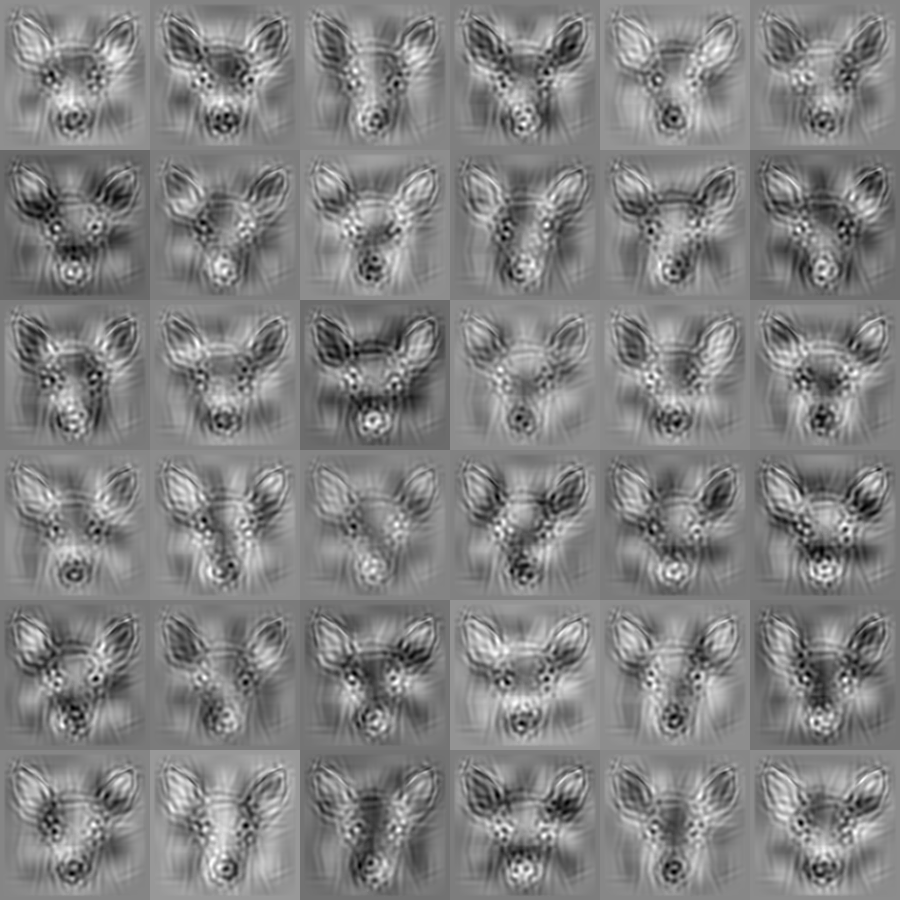
General Parameters: nOrient = 16; sizeTemplatex=150;
sizeTemplatey=200;
GaborScaleList=[0.7]; DoGScaleList=[]; GaborScaleListLastIteration=[1.4, 1, 0.7, 0.5]; DoGScaleListLastIteration=[18.90, 13.36]; sigsq = 10; locationShiftLimit = 3; orientShiftLimit = 1; numSketch= 300;
HMC Parameters: lambdaLearningRate = 0.1/sqrt(sigsq);
epsilon = 0.03;
L = 10; nIteraton =80;
Alignment Parameters: flipOrNot = false;
rotateShiftLimit=2; numberResolution=1; scaleStepSize=0.1; RatioDisplacementSUM2=0.25; numIterationEM=2;


































































































































































































General Parameters: nOrient = 16; sizeTemplatex=150;
sizeTemplatey=150;
GaborScaleList=[0.7]; DoGScaleList=[]; GaborScaleListLastIteration=[1.4, 1, 0.7, 0.5]; DoGScaleListLastIteration=[18.90, 13.36]; sigsq = 10; locationShiftLimit = 3; orientShiftLimit = 1; numSketch= 300;
HMC Parameters: lambdaLearningRate = 0.1/sqrt(sigsq);
epsilon = 0.03;
L = 10; nIteraton =80;
Alignment Parameters: flipOrNot = false;
rotateShiftLimit=2; numberResolution=1; scaleStepSize=0.1; RatioDisplacementSUM2=0.25; numIterationEM=2;




























































































































































General Parameters: nOrient = 16; sizeTemplatex=150;
sizeTemplatey=150;
GaborScaleList=[0.7]; DoGScaleList=[]; GaborScaleListLastIteration=[1.4, 1, 0.7, 0.5]; DoGScaleListLastIteration=[18.90, 13.36]; sigsq = 10; locationShiftLimit = 3; orientShiftLimit = 1; numSketch= 300;
HMC Parameters: lambdaLearningRate = 0.1/sqrt(sigsq);
epsilon = 0.03;
L = 10; nIteraton =80;
Alignment Parameters: flipOrNot = true;
rotateShiftLimit=2; numberResolution=1; scaleStepSize=0.1; RatioDisplacementSUM2=0.25; numIterationEM=2;