|
Contents |



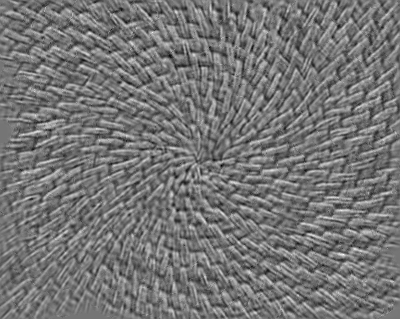
General Parameters: nOrient = 16; sizeTemplatex=100;
sizeTemplatey=100;
DoGScaleList=[15];
GaborScaleList=[1.2 0.7]; sigsq = 10; locationShiftLimit = 3; orientShiftLimit = 1; numSketch = 300; isLocalNormalize=false; toFixARGMAX = false;
HMC Parameters: lambdaLearningRate = 0.1/sqrt(sigsq);
epsilon = 0.03;
L = 10; nIteraton =40; nTileRow = 12; nTileCol = 12;
Coodebook Parameters: numCluster = 1; rotateShiftLimit=16; numberResolution=3; scaleStepSize=0.1; resizeFactor = 0.8. (for inhibition version: locationPerturbationFraction = .4)



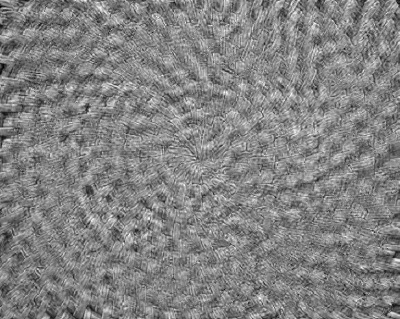
General Parameters: nOrient = 16; sizeTemplatex=100;
sizeTemplatey=100;
DoGScaleList=[15];
GaborScaleList=[1.2 0.7]; sigsq = 10; locationShiftLimit = 3; orientShiftLimit = 1; numSketch = 300; isLocalNormalize=false; toFixARGMAX = false;
HMC Parameters: lambdaLearningRate = 0.1/sqrt(sigsq);
epsilon = 0.03;
L = 10; nIteraton =40; nTileRow = 12; nTileCol = 12;
Coodebook Parameters: numCluster = 1; rotateShiftLimit=16; numberResolution=3; scaleStepSize=0.1; resizeFactor = 0.6. (for inhibition version: locationPerturbationFraction = .4)



General Parameters: nOrient = 16; sizeTemplatex=100;
sizeTemplatey=100;
DoGScaleList=[15];
GaborScaleList=[1.2 0.7]; sigsq = 10; locationShiftLimit = 3; orientShiftLimit = 1; numSketch = 100; isLocalNormalize=false; toFixARGMAX = false;
HMC Parameters: lambdaLearningRate = 0.1/sqrt(sigsq);
epsilon = 0.03;
L = 10; nIteraton =40; nTileRow = 12; nTileCol = 12;
Coodebook Parameters: numCluster = 1; rotateShiftLimit=16; numberResolution=3; scaleStepSize=0.1; resizeFactor = 1.4. (for inhibition version: locationPerturbationFraction = .4)


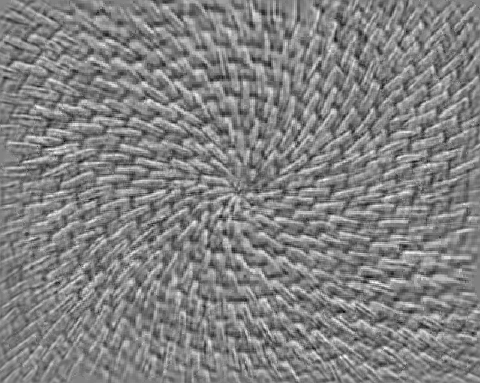
General Parameters: nOrient = 16; sizeTemplatex=100;
sizeTemplatey=100;
DoGScaleList=[15];
GaborScaleList=[1.2 0.7]; sigsq = 10; locationShiftLimit = 3; orientShiftLimit = 1; numSketch = 300; isLocalNormalize=false; toFixARGMAX = false;
HMC Parameters: lambdaLearningRate = 0.1/sqrt(sigsq);
epsilon = 0.03;
L = 10; nIteraton =40; nTileRow = 12; nTileCol = 12;
Coodebook Parameters: numCluster = 1; rotateShiftLimit=16; numberResolution=3; scaleStepSize=0.1; resizeFactor = 1. (for inhibition version: locationPerturbationFraction = .6)




General Parameters: nOrient = 16; sizeTemplatex=100;
sizeTemplatey=100;
DoGScaleList=[15];
GaborScaleList=[1.2 0.7]; sigsq = 10; locationShiftLimit = 3; orientShiftLimit = 1; numSketch = 300; isLocalNormalize=false; toFixARGMAX = false;
HMC Parameters: lambdaLearningRate = 0.1/sqrt(sigsq);
epsilon = 0.03;
L = 10; nIteraton =40; nTileRow = 12; nTileCol = 12;
Coodebook Parameters: numCluster = 1; rotateShiftLimit=16; numberResolution=3; scaleStepSize=0.1; resizeFactor = 1. (for inhibition version: locationPerturbationFraction = .4)









General Parameters: nOrient = 16; sizeTemplatex=100;
sizeTemplatey=100;
DoGScaleList=[10];
GaborScaleList=[1, 0.7]; sigsq = 10; locationShiftLimit = 3; orientShiftLimit = 1; numSketch = 250; isLocalNormalize=false; toFixARGMAX = false;
HMC Parameters: lambdaLearningRate = 0.1/sqrt(sigsq);
epsilon = 0.03;
L = 10; nIteraton =40; nTileRow = 12; nTileCol = 12;
Coodebook Parameters: numCluster = 1; rotateShiftLimit=1; numberResolution=3; scaleStepSize=0.1; resizeFactor = 1.5. (for inhibition version: locationPerturbationFraction = .75)







General Parameters: nOrient = 16; sizeTemplatex=100;
sizeTemplatey=100;
DoGScaleList=[10];
GaborScaleList=[0.7, 0.5]; sigsq = 10; locationShiftLimit = 3; orientShiftLimit = 1; numSketch = 300; isLocalNormalize=false; toFixARGMAX = false;
HMC Parameters: lambdaLearningRate = 0.1/sqrt(sigsq);
epsilon = 0.03;
L = 10; nIteraton =40; nTileRow = 12; nTileCol = 12;
Coodebook Parameters: numCluster = 1; rotateShiftLimit=3; numberResolution=3; scaleStepSize=0.1; resizeFactor = 0.8. (for inhibition version: locationPerturbationFraction = 1.0)








General Parameters: nOrient = 16; sizeTemplatex=100;
sizeTemplatey=160;
DoGScaleList=[12];
GaborScaleList=[1.2, 0.7]; sigsq = 10; locationShiftLimit = 3; orientShiftLimit = 1; numSketch = 300; isLocalNormalize=false; toFixARGMAX = false;
HMC Parameters: lambdaLearningRate = 0.1/sqrt(sigsq);
epsilon = 0.03;
L = 10; nIteraton =40; nTileRow = 12; nTileCol = 12;
Coodebook Parameters: numCluster = 1; rotateShiftLimit=1; numberResolution=3; scaleStepSize=0.1; resizeFactor = 0.6. (for inhibition version: locationPerturbationFraction = .9)







General Parameters: nOrient = 16; sizeTemplatex=100;
sizeTemplatey=100;
DoGScaleList=[10];
GaborScaleList=[1, 0.8]; sigsq = 10; locationShiftLimit = 2; orientShiftLimit = 1; numSketch = 270; isLocalNormalize=false; toFixARGMAX = false;
HMC Parameters: lambdaLearningRate = 0.1/sqrt(sigsq);
epsilon = 0.03;
L = 10; nIteraton =40; nTileRow = 12; nTileCol = 12;
Coodebook Parameters: numCluster = 2; rotateShiftLimit=16; numberResolution=3; scaleStepSize=0.1; resizeFactor = 1.4. (for inhibition version: locationPerturbationFraction = .5)




General Parameters: nOrient = 16; sizeTemplatex=100;
sizeTemplatey=100;
DoGScaleList=[10];
GaborScaleList=[0.8, 0.6]; sigsq = 10; locationShiftLimit = 3; orientShiftLimit = 1; numSketch = 300; isLocalNormalize=false; toFixARGMAX = false;
HMC Parameters: lambdaLearningRate = 0.1/sqrt(sigsq);
epsilon = 0.03;
L = 10; nIteraton =40; nTileRow = 12; nTileCol = 12;
Coodebook Parameters: numCluster = 2; rotateShiftLimit=16; numberResolution=3; scaleStepSize=0.1; resizeFactor = 1. (for inhibition version: locationPerturbationFraction = .6)










































General Parameters: nOrient = 16; sizeTemplatex=100;
sizeTemplatey=100;
DoGScaleList=[12];
GaborScaleList=[1.2, 0.7, 0.5]; sigsq = 10; locationShiftLimit = 3; orientShiftLimit = 1; numSketch = 300; isLocalNormalize=false; toFixARGMAX = false;
HMC Parameters: lambdaLearningRate = 0.1/sqrt(sigsq);
epsilon = 0.03;
L = 10; nIteraton =40; nTileRow = 12; nTileCol = 12;
Coodebook Parameters: numCluster = 8; rotateShiftLimit=2; numberResolution=3; scaleStepSize=0.1; resizeFactor = [160 160]; numIter=10; (for inhibition version: locationPerturbationFraction = .4)
































































General Parameters: nOrient = 16; sizeTemplatex=100;
sizeTemplatey=100;
DoGScaleList=[15];
GaborScaleList=[1, 0.7]; sigsq = 10; locationShiftLimit = 3; orientShiftLimit = 1; numSketch = 300; isLocalNormalize=false; toFixARGMAX = false;
HMC Parameters: lambdaLearningRate = 0.1/sqrt(sigsq);
epsilon = 0.03;
L = 10; nIteraton =40; nTileRow = 12; nTileCol = 12;
Coodebook Parameters: numCluster = 2; rotateShiftLimit=2; numberResolution=3; scaleStepSize=0.1; resizeFactor = 0.35; (for inhibition version: locationPerturbationFraction = .9)




General Parameters: nOrient = 16; sizeTemplatex=100;
sizeTemplatey=100;
DoGScaleList=[10];
GaborScaleList=[0.8, 0.6]; sigsq = 10; locationShiftLimit = 3; orientShiftLimit = 1; numSketch = 300; isLocalNormalize=false; toFixARGMAX = false;
HMC Parameters: lambdaLearningRate = 0.1/sqrt(sigsq);
epsilon = 0.03;
L = 10; nIteraton =40; nTileRow = 12; nTileCol = 12;
Coodebook Parameters: numCluster = 2; rotateShiftLimit=16; numberResolution=3; scaleStepSize=0.1; resizeFactor = 0.5; (for inhibition version: locationPerturbationFraction = .4)



























General Parameters: nOrient = 16; sizeTemplatex=100;
sizeTemplatey=100;
DoGScaleList=[10];
GaborScaleList=[1, 0.8, 0.6]; sigsq = 10; locationShiftLimit = 3; orientShiftLimit = 1; numSketch = 300; isLocalNormalize=false; toFixARGMAX = false;
HMC Parameters: lambdaLearningRate = 0.1/sqrt(sigsq);
epsilon = 0.03;
L = 10; nIteraton =40; nTileRow = 12; nTileCol = 12;
Coodebook Parameters: numCluster = 3; rotateShiftLimit=2; numberResolution=3; scaleStepSize=0.1; resizeFactor = 0.5; (for inhibition version: locationPerturbationFraction = .4)





















General Parameters: nOrient = 16; sizeTemplatex=100;
sizeTemplatey=100;
DoGScaleList=[15];
GaborScaleList=[1, 0.7]; sigsq = 10; locationShiftLimit = 2; orientShiftLimit = 1; numSketch = 300; isLocalNormalize=false; toFixARGMAX = false;
HMC Parameters: lambdaLearningRate = 0.1/sqrt(sigsq);
epsilon = 0.03;
L = 10; nIteraton =40; nTileRow = 12; nTileCol = 12;
Coodebook Parameters: numCluster = 2; rotateShiftLimit=2; numberResolution=3; scaleStepSize=0.1; resizeFactor = 0.6; (for inhibition version: locationPerturbationFraction = .6)






















































General Parameters: nOrient = 16; sizeTemplatex=100;
sizeTemplatey=100;
DoGScaleList=[12];
GaborScaleList=[1, 0.8]; sigsq = 10; locationShiftLimit = 3; orientShiftLimit = 1; numSketch = 250; isLocalNormalize=false; toFixARGMAX = false;
HMC Parameters: lambdaLearningRate = 0.1/sqrt(sigsq);
epsilon = 0.03;
L = 10; nIteraton =40; nTileRow = 12; nTileCol = 12;
Coodebook Parameters: numCluster = 4; rotateShiftLimit=2; numberResolution=3; scaleStepSize=0.1; resizeFactor = 0.7; (for inhibition version: locationPerturbationFraction = .4)