iFRAME (inhomogeneous Filters Random Field And Maximum Entropy)
Experiment 2: Learning Sparse FRAME Model by Langevin Dynamics and Generative Boosting
Code and dataset
Contents
Case 1
:
Cat
Case 2
:
Tiger
Case 3
:
Hummingbird
Case 4
:
Lion
Case 1: Cat
Training images:
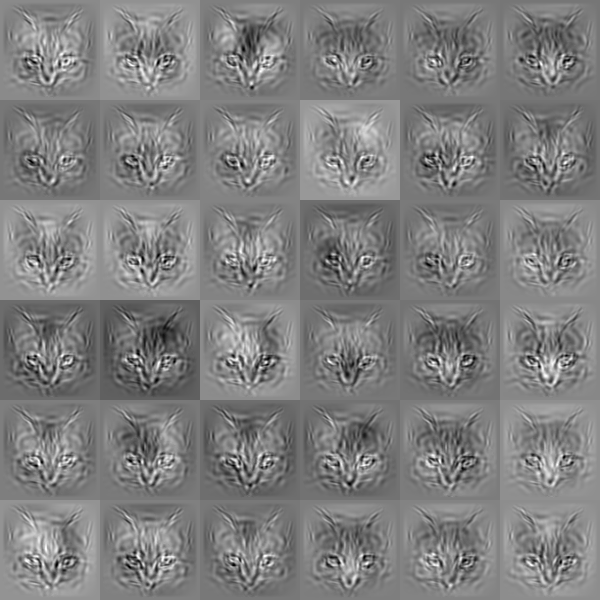
Synthesis by Langevin Dynamics
(click here for movie of learning process)
parameters setting:
General Parameters
: nOrient = 16; sizeTemplatex=100; sizeTemplatey=100; GaborScaleList=[ 1.4, 1, 0.7, 0.5]; DoGScaleList =[18.90, 13.36]; LocationShiftLimit=2; OrientShiftLimit=1; interval=3; #Wavelet=300; nIteration= (interval) x (#Wavelet) x 2;
Langevin Dynamics
: lambdaLearningRate = 0.1/sqrt(sigsq); nIteraton =100; 6x6 chains; sigsq=10; stepsize = 1.0; L= 10;
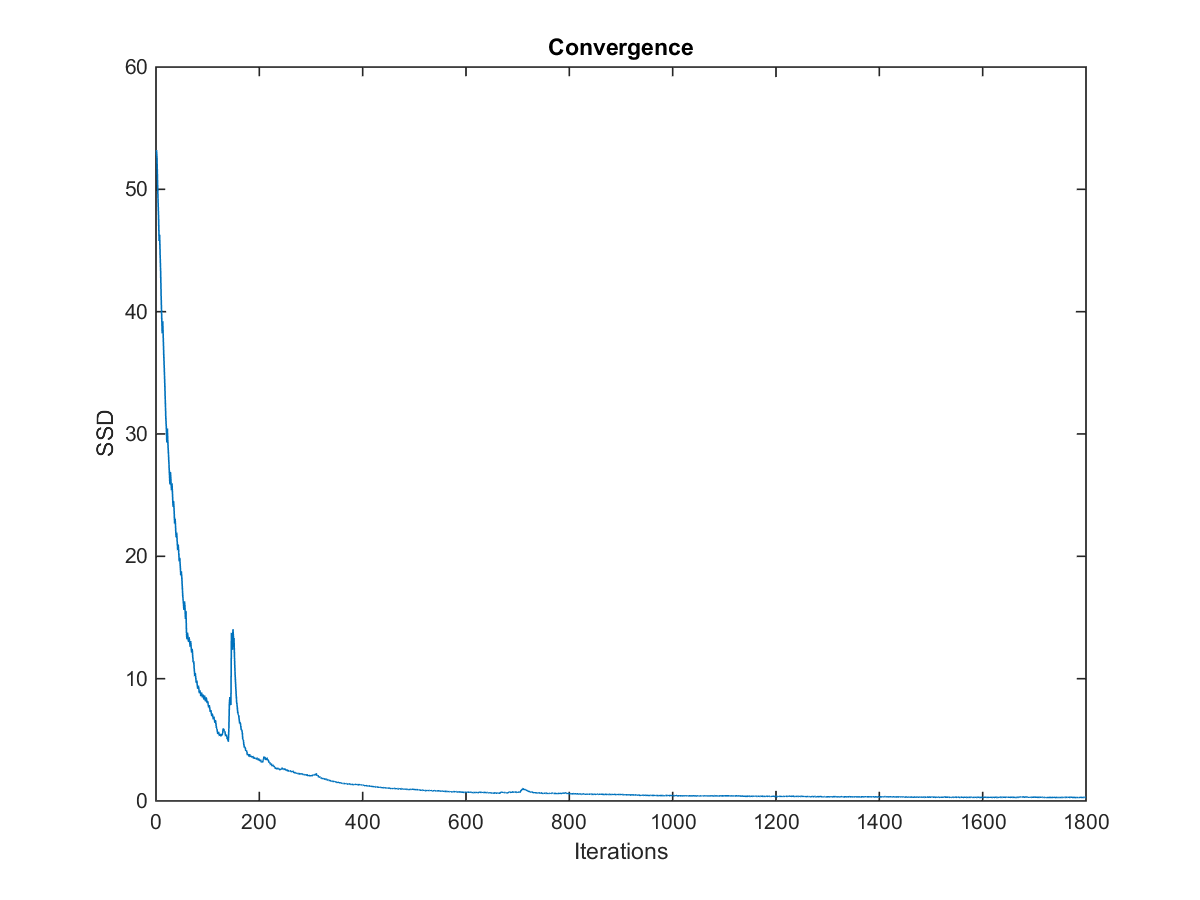
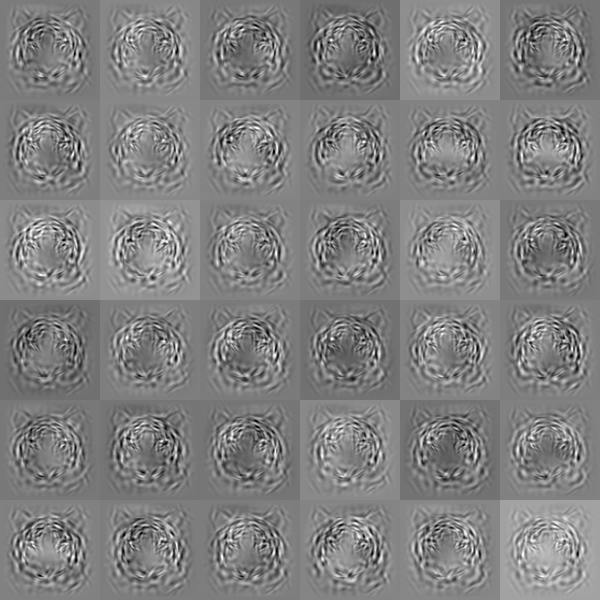
Case 2: Tiger
Training images
Synthesis by Langevin Dynamics
(click here for movie of learning process)
parameters setting:
General Parameters
: nOrient = 16; sizeTemplatex=100; sizeTemplatey=100; GaborScaleList=[ 1.4, 1, 0.7, 0.5]; DoGScaleList =[18.90, 13.36]; LocationShiftLimit=2; OrientShiftLimit=1; interval=3; #Wavelet=300; nIteration= (interval) x (#Wavelet) x 2;
Langevin Dynamics
: lambdaLearningRate = 0.1/sqrt(sigsq); nIteraton =100; 6x6 chains; sigsq=10; stepsize = 1.4; L= 10;
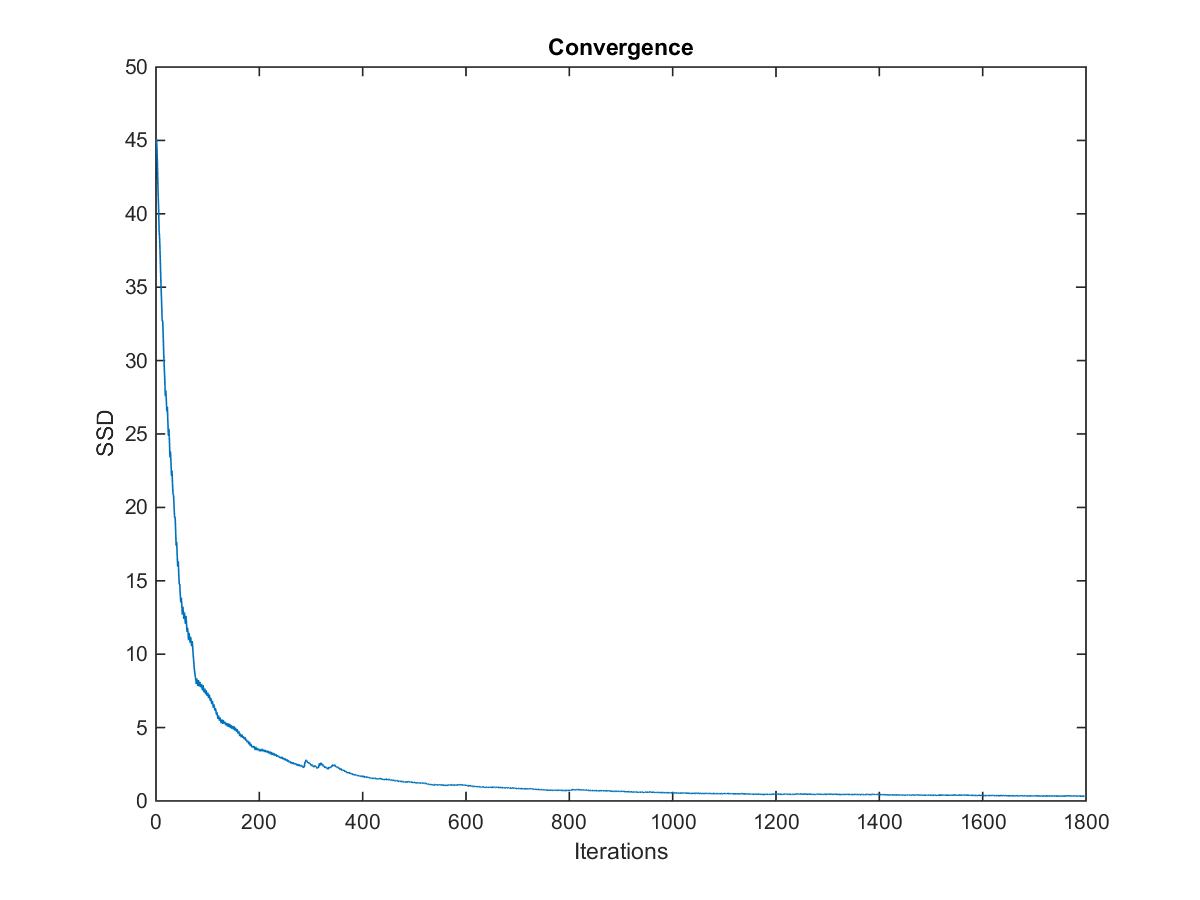
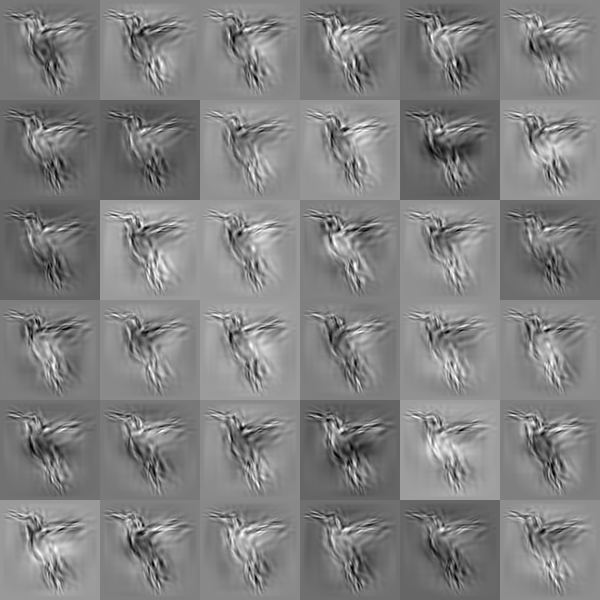
Case 3: Hummingbird
Training images
Synthesis by Langevin Dynamics
(click here for movie of learning process)
parameters setting:
General Parameters
: nOrient = 16; sizeTemplatex=100; sizeTemplatey=100; GaborScaleList=[ 1.4, 1, 0.7, 0.5]; DoGScaleList =[18.90, 13.36]; LocationShiftLimit=2; OrientShiftLimit=1; interval=3; #Wavelet=300; nIteration= (interval) x (#Wavelet) x 2;
Langevin Dynamics
: lambdaLearningRate = 0.1/sqrt(sigsq); nIteraton =100; 6x6 chains; sigsq=10; stepsize = 1.0; L= 10;
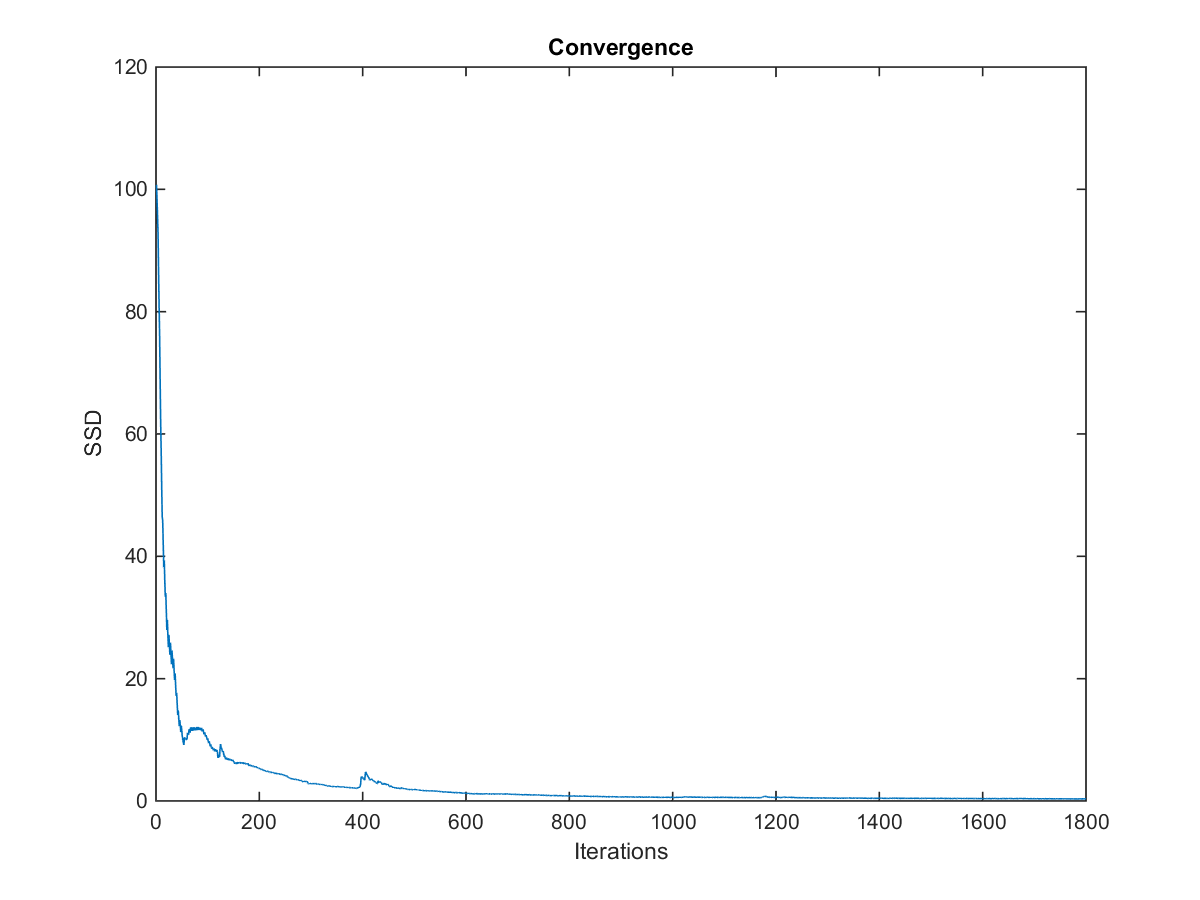
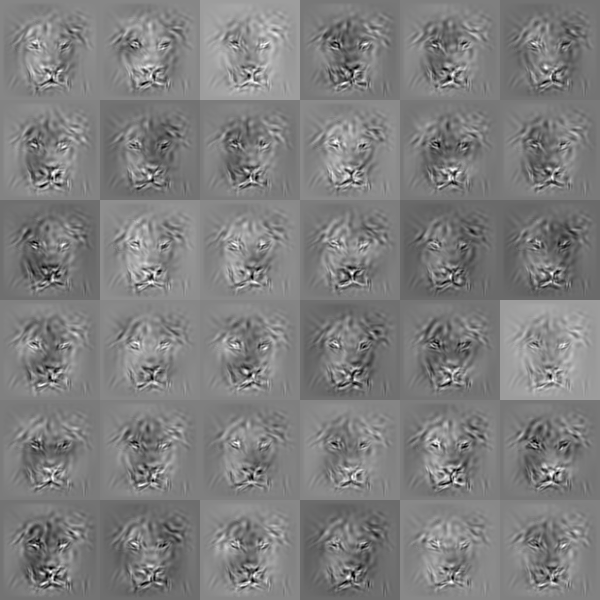
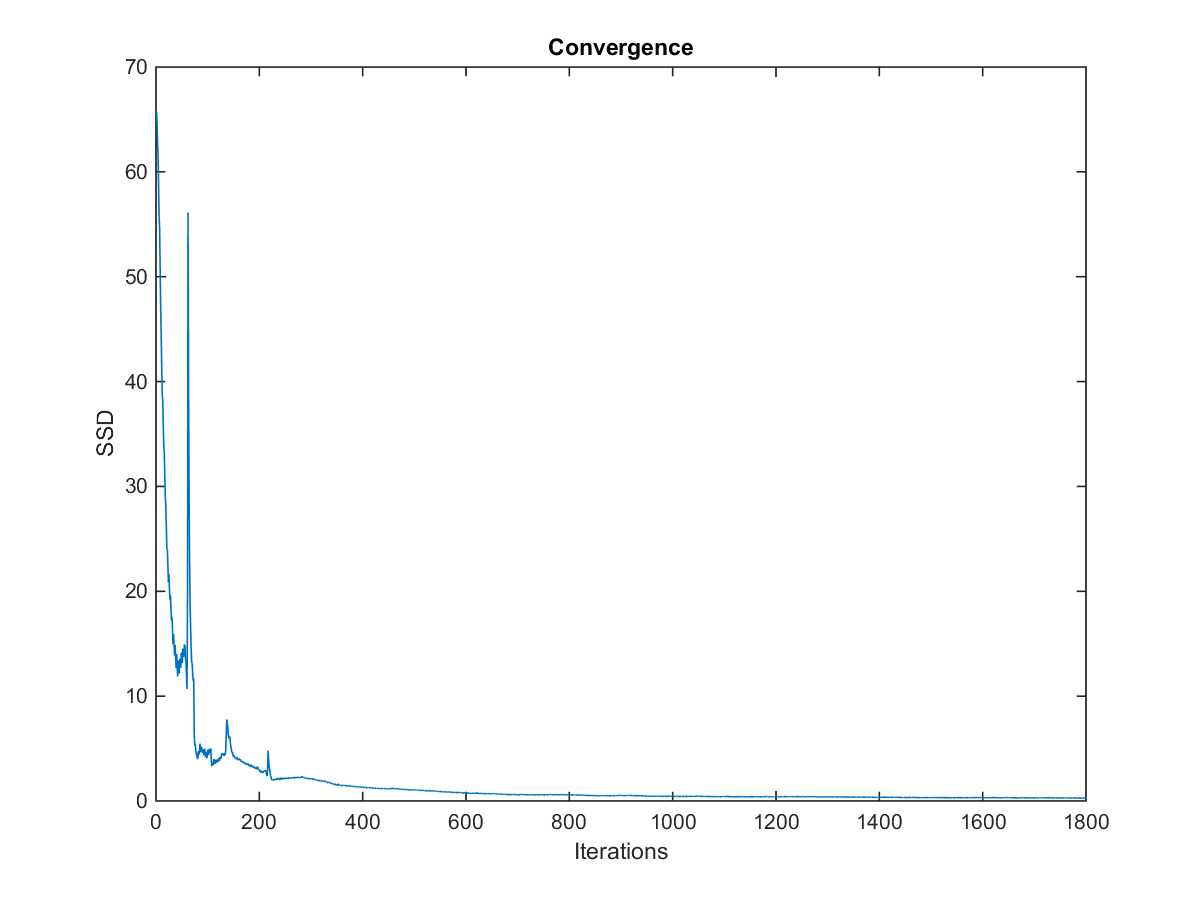
Case 4: Lion
Training images
Synthesis by Langevin Dynamics
(click here for movie of learning process)
parameters setting:
General Parameters
: nOrient = 16; sizeTemplatex=100; sizeTemplatey=100; GaborScaleList=[ 1.4, 1, 0.7, 0.5]; DoGScaleList =[18.90, 13.36]; LocationShiftLimit=2; OrientShiftLimit=1; interval=3; #Wavelet=300; nIteration= (interval) x (#Wavelet) x 2;
Langevin Dynamics
: lambdaLearningRate = 0.1/sqrt(sigsq); nIteraton =100; 6x6 chains; sigsq=10; stepsize = 1.0; L= 10;