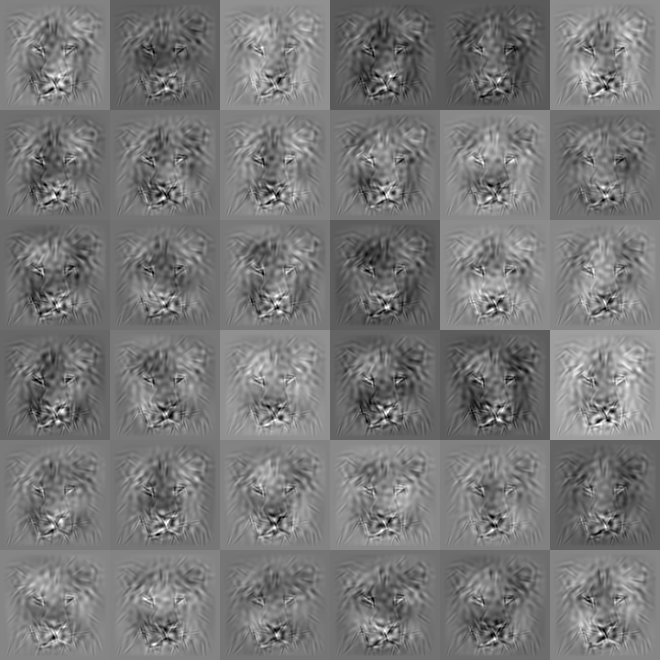
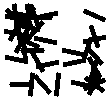
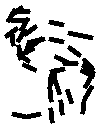
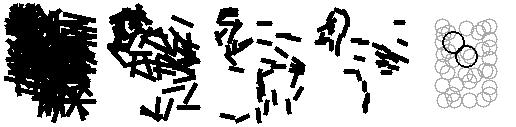
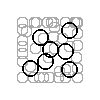
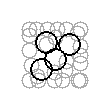
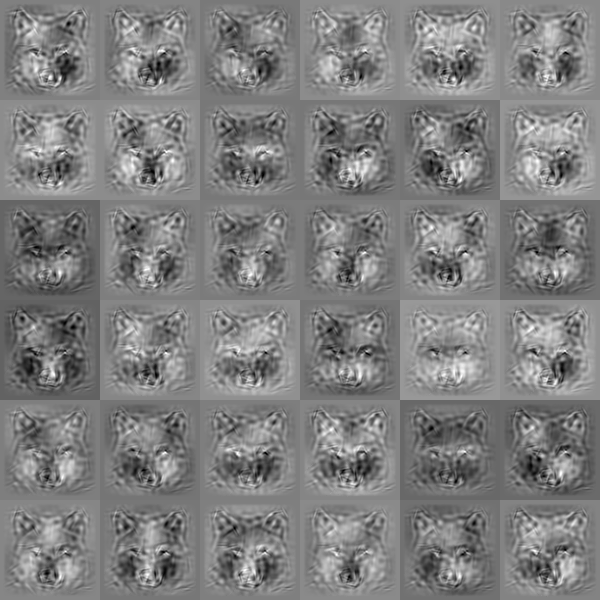
learned templates (Layout of Gabors and DoGs)




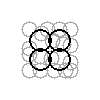
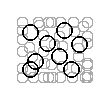
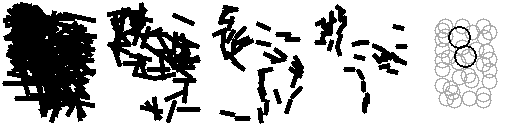
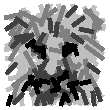
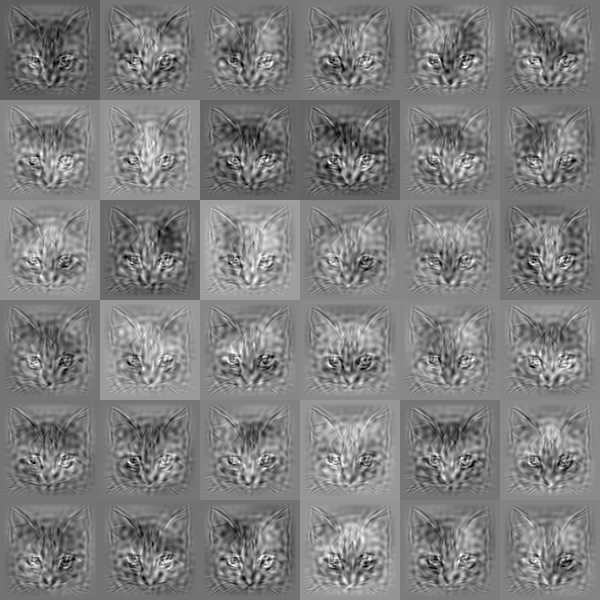
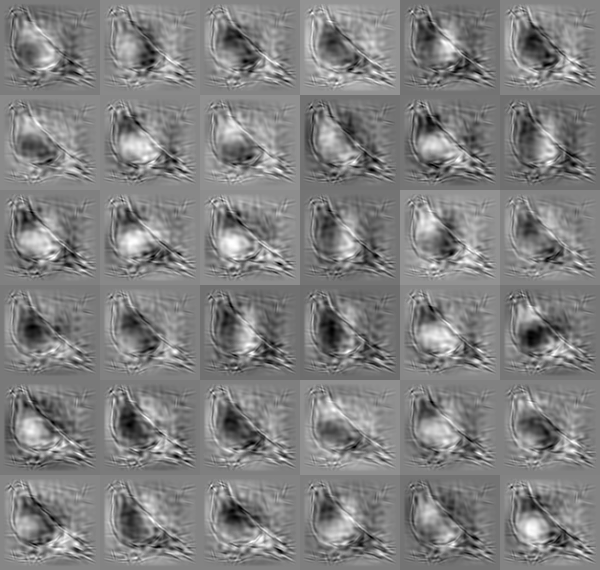
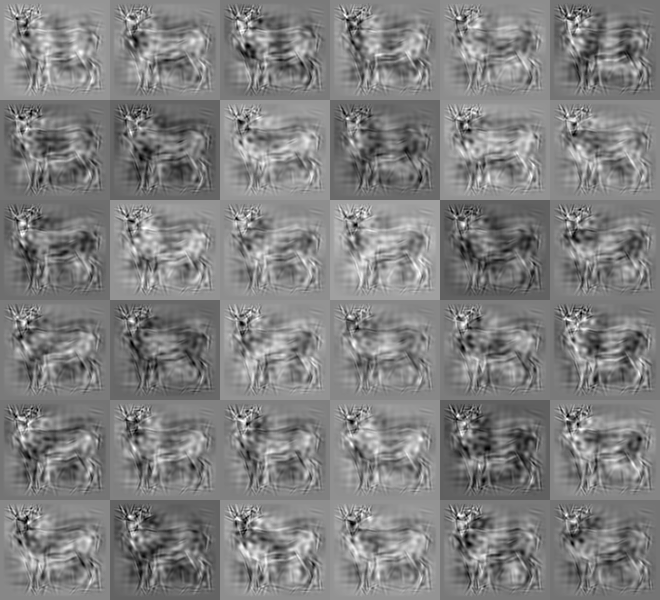
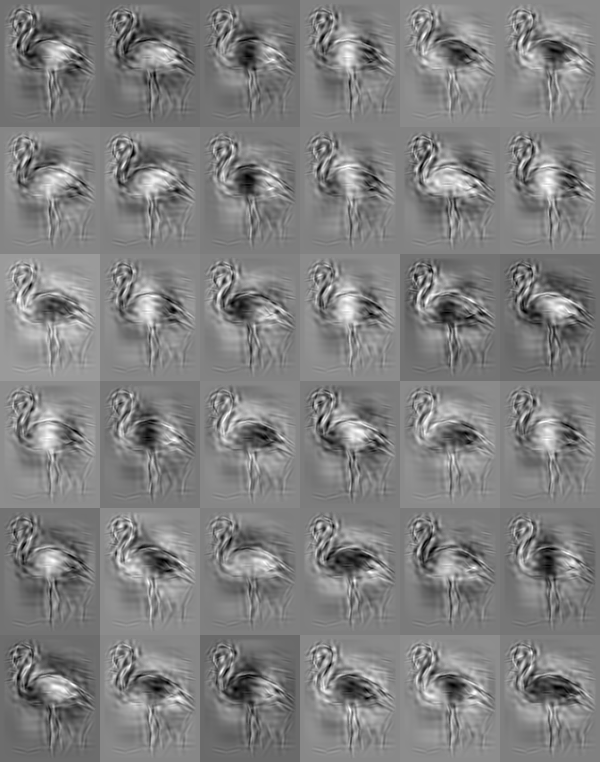
deformed templates at different scales












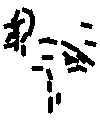
template

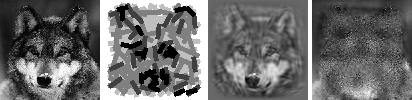
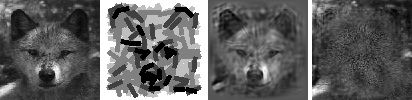
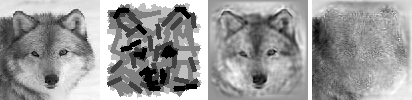
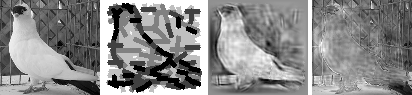
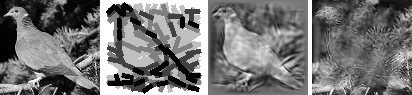
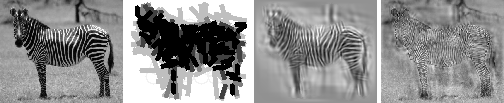
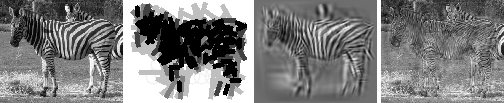
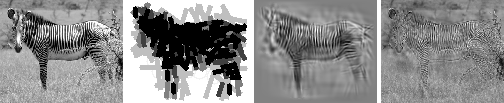
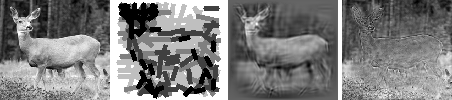
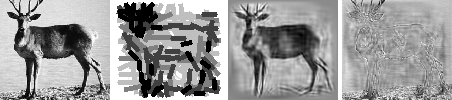
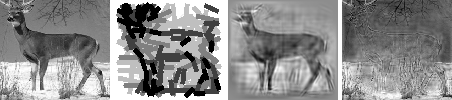
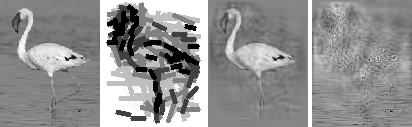
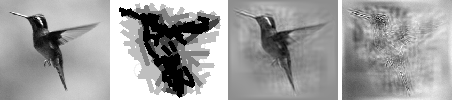
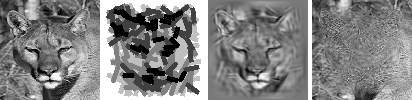
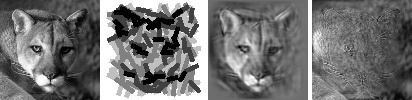
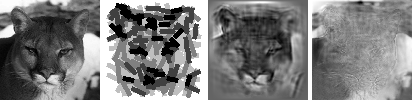
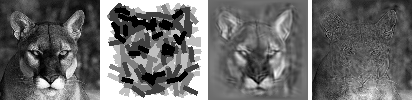
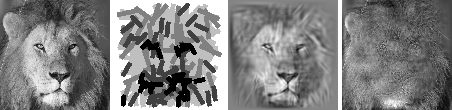
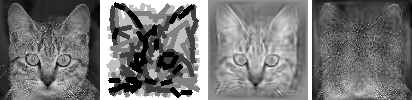
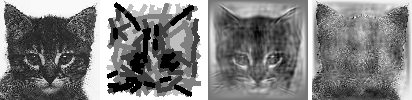
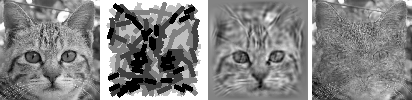
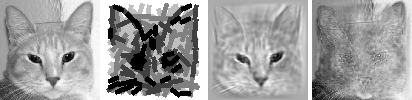
(i) original (ii) templates (iii) reconstruced (iv) residual
|
Contents |
|
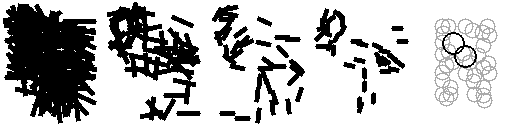
learned templates (Layout of Gabors and DoGs)
deformed templates at different scales
|
template
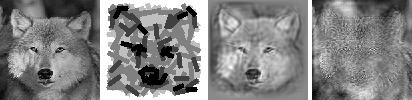
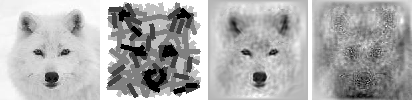
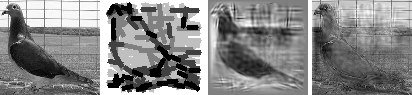
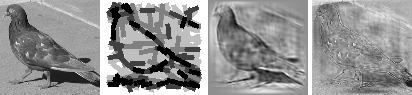
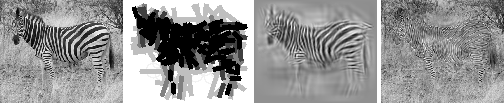
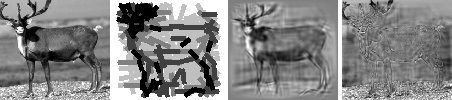
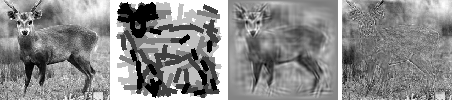
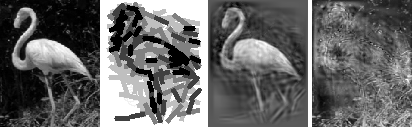
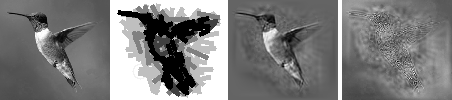
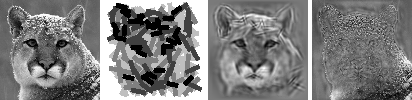
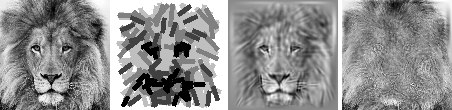
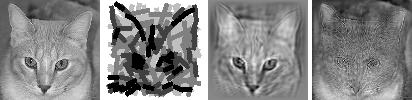
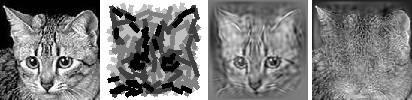
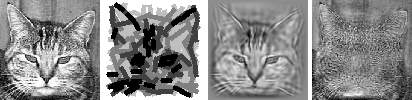
(i) original (ii) templates (iii) reconstruced (iv) residual
|
|
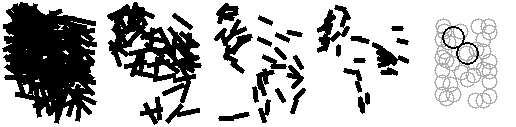
learned templates (Layout of Gabors and DoGs)
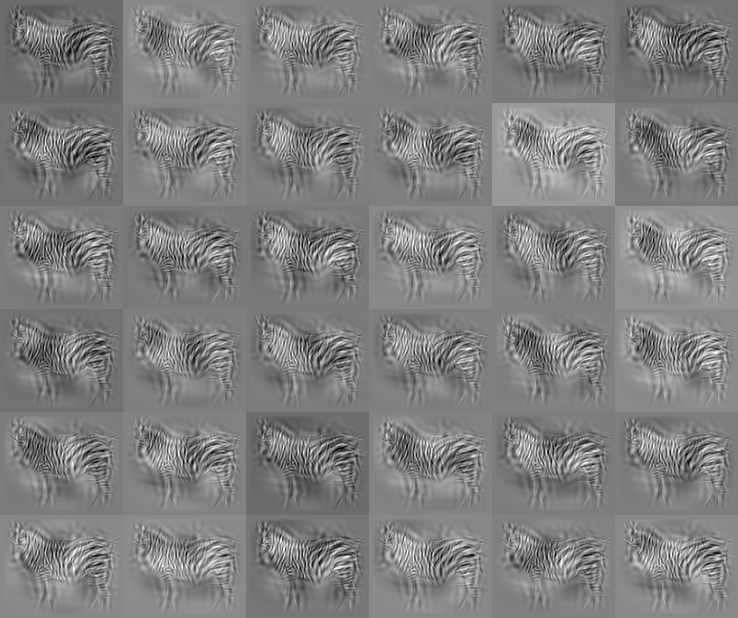
deformed templates at different scales
|
template
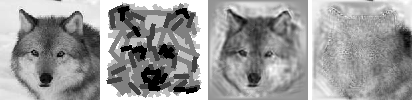
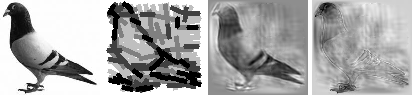
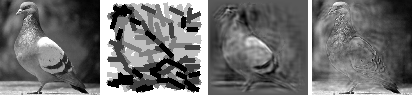
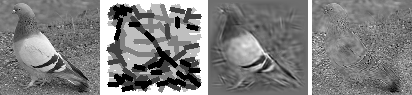
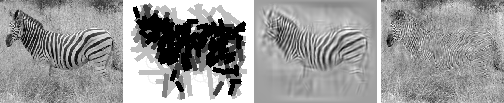
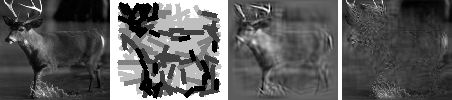
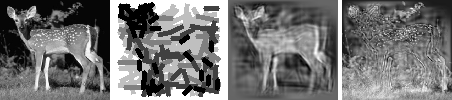
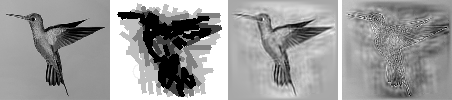
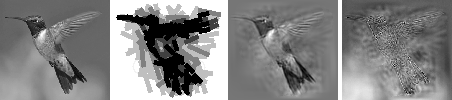
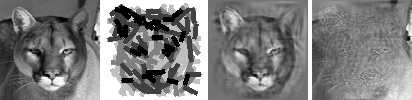
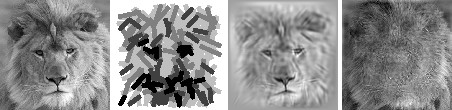
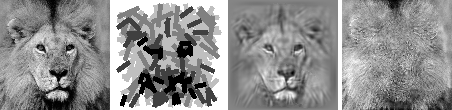
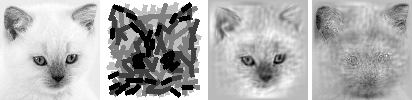
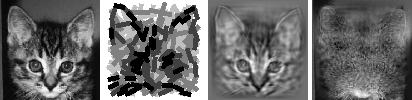
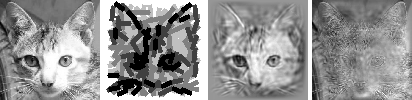
(i) original (ii) templates (iii) reconstruced (iv) residual
|
|
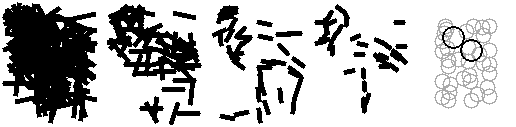
learned templates (Layout of Gabors and DoGs)
deformed templates at different scales
|
template
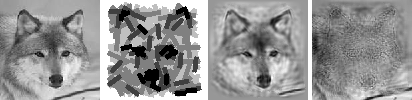
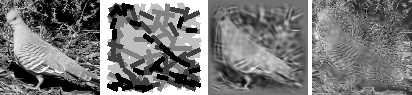
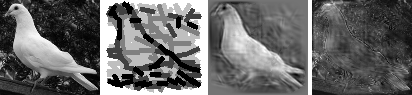
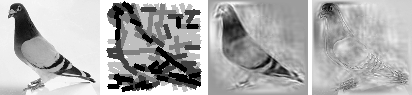
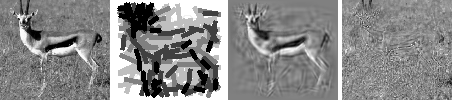
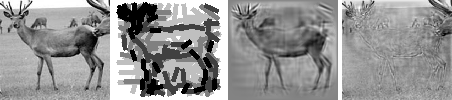
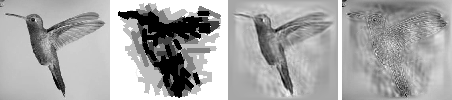
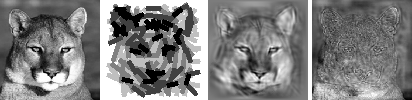
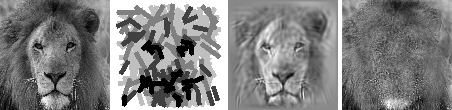
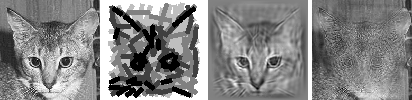
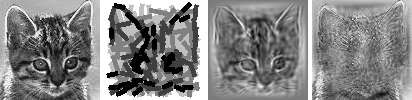
(i) original (ii) templates (iii) reconstruced (iv) residual
|
|
learned templates (Layout of Gabors and DoGs)
deformed templates at different scales
|
template
(i) original (ii) templates (iii) reconstruced (iv) residual
|
|
learned templates (Layout of Gabors and DoGs)
deformed templates at different scales
|
template
(i) original (ii) templates (iii) reconstruced (iv) residual
|
|
learned templates (Layout of Gabors and DoGs)
deformed templates at different scales
|
template
(i) original (ii) templates (iii) reconstruced (iv) residual
|
|
learned templates (Layout of Gabors and DoGs)
deformed templates at different scales
|
template
(i) original (ii) templates (iii) reconstruced (iv) residual
|
|
learned templates (Layout of Gabors and DoGs)
deformed templates at different scales
|
template
(i) original (ii) templates (iii) reconstruced (iv) residual
|
|
learned templates (Layout of Gabors and DoGs)
deformed templates at different scales
|
template
(i) original (ii) templates (iii) reconstruced (iv) residual
|