Cooperation: Bootstrapping Imagined We for Cooperation
Abstract
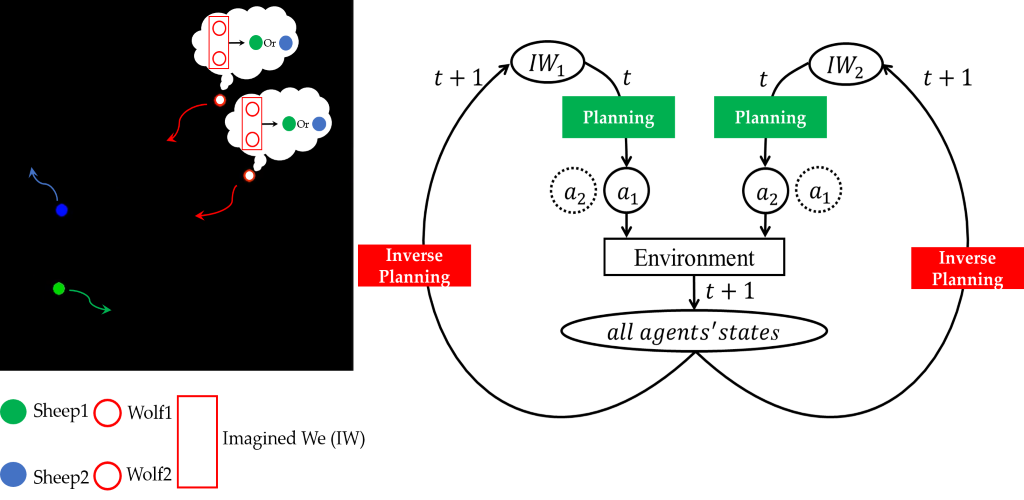
Remaining committed to a joint goal in the face of many enticing alternatives is challenging. Doing so while cooperating with others under uncertainty is even more so. Despite this, agents can successfully and robustly use bootstrapping to con-verge on a joint intention from randomness under the Imagined We framework. We demonstrate the power of this model in a real-time cooperative hunting task. Additionally, we run a suite of model experiments to answer some of the potential challenges to converging that this model could face under imperfect conditions. Specifically, we ask what happens when (1) there are increasingly many equivalent choices? (2) I only have an approximate model of you? and (3) my perception is noisy? We show through a set of model experiments that this framework is robust to all three of these manipulations.
Demo
Imagined We model in the cooperative hunting task with 2 sheep