The learner is presented with the example images only, without supervision on the orientation of intereted objects. The single template learned by EM iterations can then sketch an object in the image upon the posterior decision of orientation.



Learned template in the first three iterations.
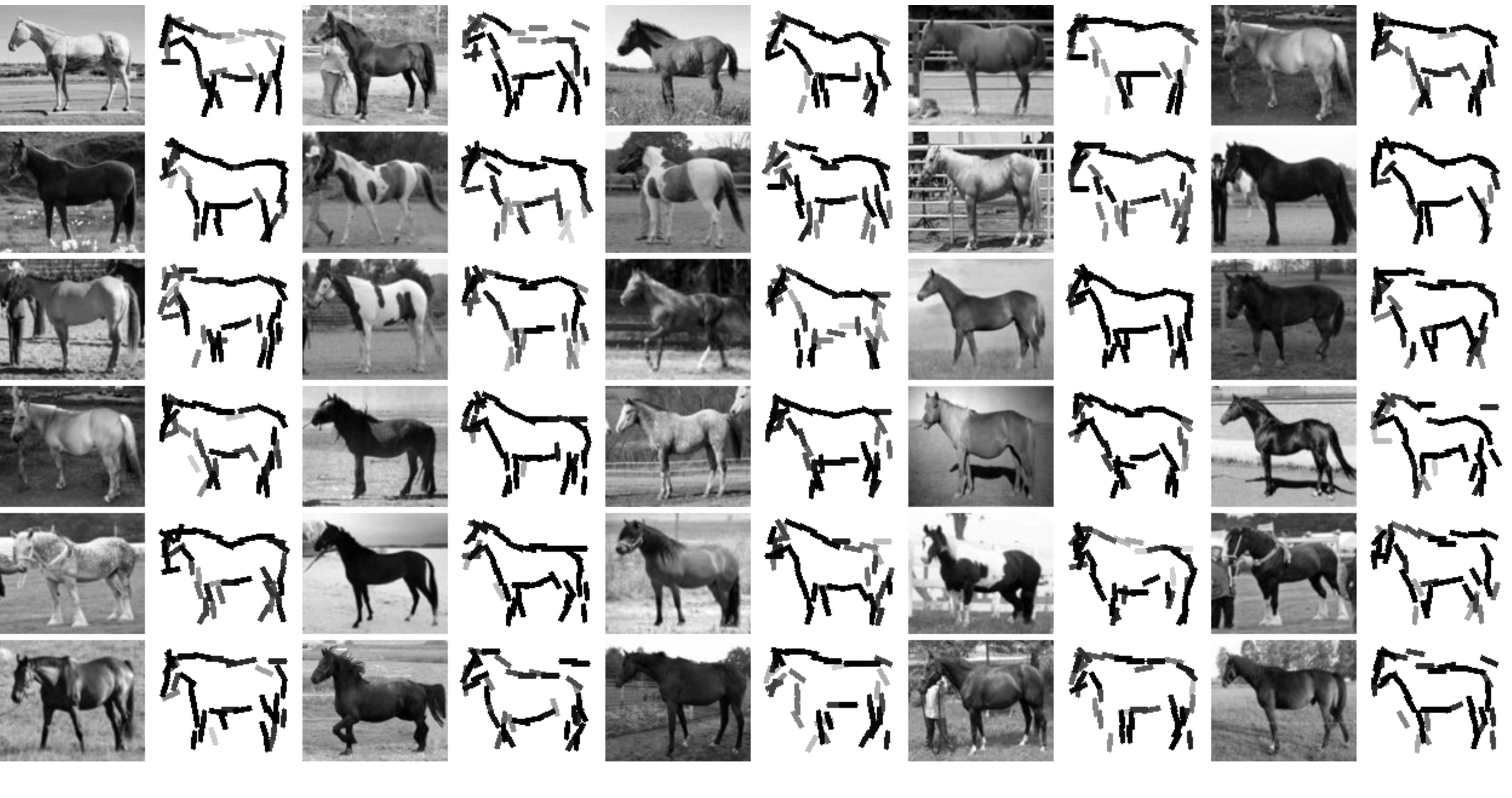
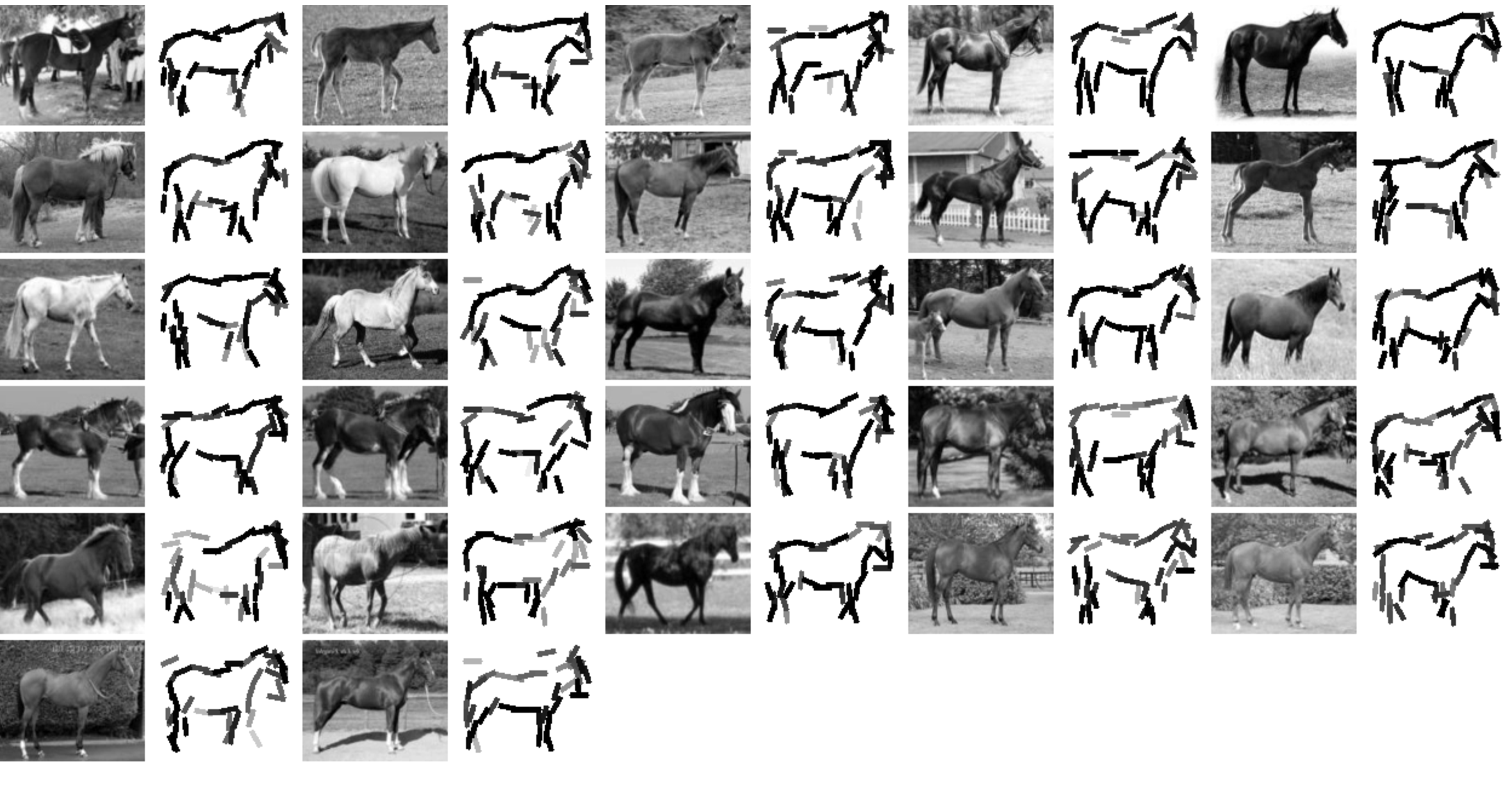
Template learned from images of horses facing two different directions. The first row displays the templates learned in the first 3 iterations of the EM algorithm. In the second row, for each training image the deformed template (either in the original pose or in the flipped pose) is plotted to the right of it. The number of training images is 57. The image size is 120 * 100. The number of elements is 40. The number of EM iterations is 3.


Learned template in the first three iterations.


Template learned from 11 images of pigeons at different directions. The image size is 150 * 150. The number of elements is 50. The number of iterations is 3. On the left we show the learned templates in the three iterations.
Learned template after five iterations.
Template learned from 15 images of baseball caps facing different orientations. The image size is 100 * 100. The number of elements is 30 (it is set at 40 in the paper). The number of iterations is 5.
full EM version
Learned template after six iterations.
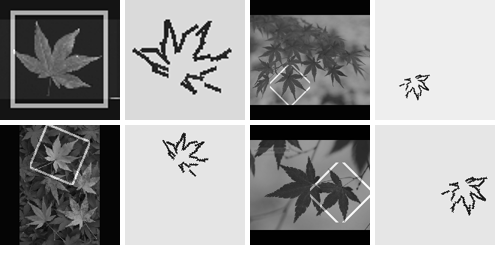
Template learned from 4 images of maples at different orientations and locations. The template size is 80 * 80. The image sizes varies The number of elements is 25. The number of iterations is 6.